ANG JIA YI
Ang Jia Yi currently joins Micron Memory Taiwan as an advance packaging technology development department as silicon integration. He previously had years of experience in various programming language Eg: Modelling, C programming, Python, MATLAB Vision knowledge. He love robotic and have vase knowledge in embedded system
Mechatronic Engineer, Software Engineer, Project Manager, Data Engineer, Research & Development,
TW
[email protected]
Research Gate Page
My Curriculum Vitae
SKILL
C language, Assembly, Python, Basic Stamp, PLC, Matlab, PCB design, Robotics, Embedded system, 3D printing, Control system, Arduino, Microcontroller, LabView, Electronic and Electrical, System Identification, Artificial Neuron Network, Composite materials and piping, Machine Vision, Signal Processing, PHP .
Work Experience
Micron Technology 台灣美光, Test Solution Engineer, Mar 2022 ~ Present
-HBM2e & HBM3 3D Packaging Test Program Development
-Develop test program for HBM production automated test equipment including new test, product algorithms which covers software and hardware requirements.
-Evaluate and verify yield/quality to ensure the -Provide statistical data analysis, analytics and justification on program validation and its release
Micron Technology 台灣美光, APTD SILICON INTEGRATION ENGINEER, Feb 2021 ~ Mar 2022
HBM2e & HBM3 3D Packaging Research Program and Development
Analyze and improve BEOL layout and chip package interaction (CPI) failure
Prepare test environment for new test chip by determine the spec limit and monitor yield.
Prepare details information for team member by document layout and CPI information.
Provide layout related support to process team on determine failure
Braintech Sdn Bhd, Project Manager, Jun 2019 ~ Jul 2020
Manage and maintain brain computer interface the product/software development
Meet customer timeline and expectation by managing the project flow
Increase the brain signal channel from 2 to 6 channel by restructure hardware and software
Interpret brain signal using ANN modelling for hardware application
Represent company in various talk, expedition, and competition local or oversea
X-CProblem, R&D Engineer, Apr 2014 ~ Oct 2018
Fulfill customer need by dealing with both hardware and software development
Design a python based raspberry pi MCU tutorial module for lecturer
Develop a mini demo waves electric generator
Develop and design a SPA system by preparing the embedded system, custom protocol and PCB circuits to communicate with smartphone device using Bluetooth
Redesign a hotel door lock system by giving support on the protocol restructure to support IoT system to link with smartphone
Cytron Technology Sdn Bhd, Internship Test Engineer, Jun 2012 ~ Aug 2012
Design MCU PIC16/18 training kit by prepare coding tutorial and training documentation
Decode PS2 keyboard/mouse protocol as controller input by prepare sample code/circuit
Preparing NFC-MCU application by understanding protocol and preparing tutorial
Design high power motor robot and control using RF signal
EDUCATION
Doctor of Philosophy (Ph.D.) in Mechatronic Engineering, School of Mechatronic Engineering, University Malaysia Perlis, Perlis, Malaysia 2013/10 – 2018/10
Bachelor of Engineering (Hons) in Mechatronic Engineering, School of Mechatronic Engineering, University Malaysia Perlis, Perlis, Malaysia 2009/6 – 2013/10
Professional Certification
Graduate Engineer, Board of Engineer Malaysia (BEM), 102258A (Mechatronic)
Certified LabVIEW Associate Developer (CLAD), 100-312-1821 (National Instruments)
Publication
Universiti Malaysia Perlis, Doctor of Philosophy (PhD), Mechatronic Engineering, 2013 ~ 2018
With the rapid growth of science and technology, glass fibre reinforced epoxy (GRE) composite pipe has become part of the vital engineering elements in the engineering field. Therefore, qualification program plays an important role to ensure that the performance of the GRE pipe has achieved a reliable standard with excellent quality. Conventional test procedure which refers to ISO 14692 qualification test based on the regression analysis requires typically extensive amounts of time and cost to identify the performance of the new composite pipe. With the aid of mathematical modelling, the performance of the composite pipe can be predicted where this can reduce errors when designing the pipe. This research aims to model the performance of the GRE composite pipes and thus, identify the pipe’s first ply failure (FPF). First of all, an artificial neural network (ANN) model was developed to predict the onset of failure of GRE composite pipes. The ANN model was developed using input data namely, modulus of elasticity (axial), modulus of elasticity (hoop), volume fraction, diameter, thickness, pipe winding angle, stress ratio and pressure and the output data from the first-ply failure indicator of experimental data from previous research. The data obtained then underwent the smoothing and classification process to improve the accuracy of the model developed. In the smoothing process, the data was filtered using a smoothing algorithm to remove the unnecessary noise data followed by the classification process which categorised, recognised and differentiated the data from the known population. After the pre-processing, the data was used for the model training process. In the process, neural network training parameters needed to be decided. The parameter decided the number of neurons and the number of layers. In the model development, the mean accuracy of the model was calculated based on ten trials. By analysis and various trials, the highest accuracy model obtained would be used to predict the first-ply failure of the GRE composite pipe. A portable automated pressure test rig was also developed based on the monotonic/cyclic test protocol similar to the procedure elucidated in ASTM D2992 standard. The test rig served as a platform to obtain the experimental data for another model verification procedures. The validation process, on the other hand, was conducted to strengthen the reliability of the ANN model obtained. The validation process of the model was conducted using some other finding which was not included in the training process data. Therefore, the developed model was expected to predict the first-ply failure within the pipe composite laminated under various biaxial stress ratios. From the result, the three-layer ANN model structure was chosen where the means accuracy achieved was within 95%-99.66%. From the model verification process, the pure hydrostatic experimental comparison and the five different stress ratios test for ±55° GRE pipe accuracy was in the range of 77%-97%. For the validation test with experimental findings, a good agreement with the model’s predictions was achieved, with less than 30% variation. From the results, it has suggested that the ANN model can be extended to yield useful predictions of the onset of failure in composite pipes under a range of stress conditions. This can be utilised as an internal means for pipe rating prior to the required standard of the ASTM qualification process.
Universiti Malaysia Perlis, Bachelor of Engineering (Hons)(BEng), Mechatronic Engineering, 2008 ~ 2013
Vibration normally will be a problem for satellite since there are disturbance occurred when maneuvering the satellite due to satellite reaction wheel and the solar wind. Therefore studying on vibration is one of the important issues to solve the problem of the vibration. Modeling for the flexible structure for the satellite which causes vibration would be proposed. The appendages of the satellite will only be represented by using a cantilever. Only an appendage will be considered for the sake of analysis. The mathematical equation of the cantilever and its model will be developed and designed in order to make research on it. The combination of embedded system and control system will be applied for analysis and to verify and developed model. Passive damper is introduced in this project to reduce the vibration. Also an active damper will be tested for further reducing the vibration. The development of the flexible model had been verified through cantilever experiment. Passive damper has been used to reduce the vibration and further improvement has been achieved further using an active damper.
Project 1

Design and Development of Artificial Neural Network Model for Liquid Pressurized System Based on Glass Fibre Reinforced Epoxy (GRE) Composite Pipe
(Q1, IF: 3.858)
Patent Application No. : PI 2015 700298
Industry Design Application No. : 15-E0048-0101
Project 2
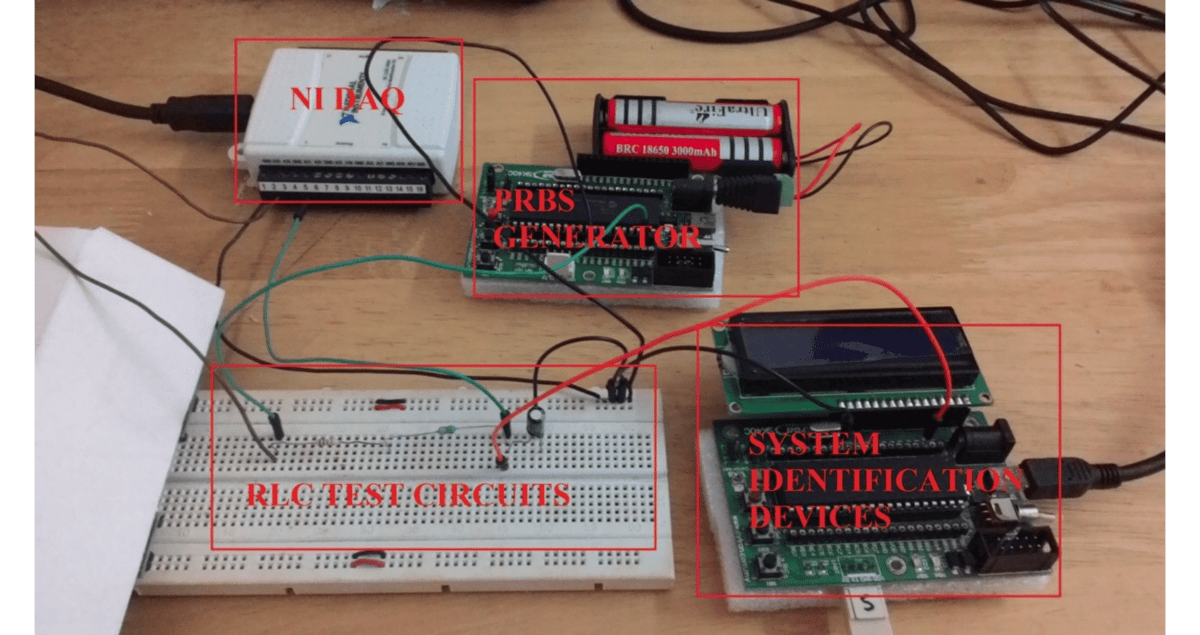
Microcontroller-based for system identification tools using least square method for RC circuits
SCOPUS Indexed
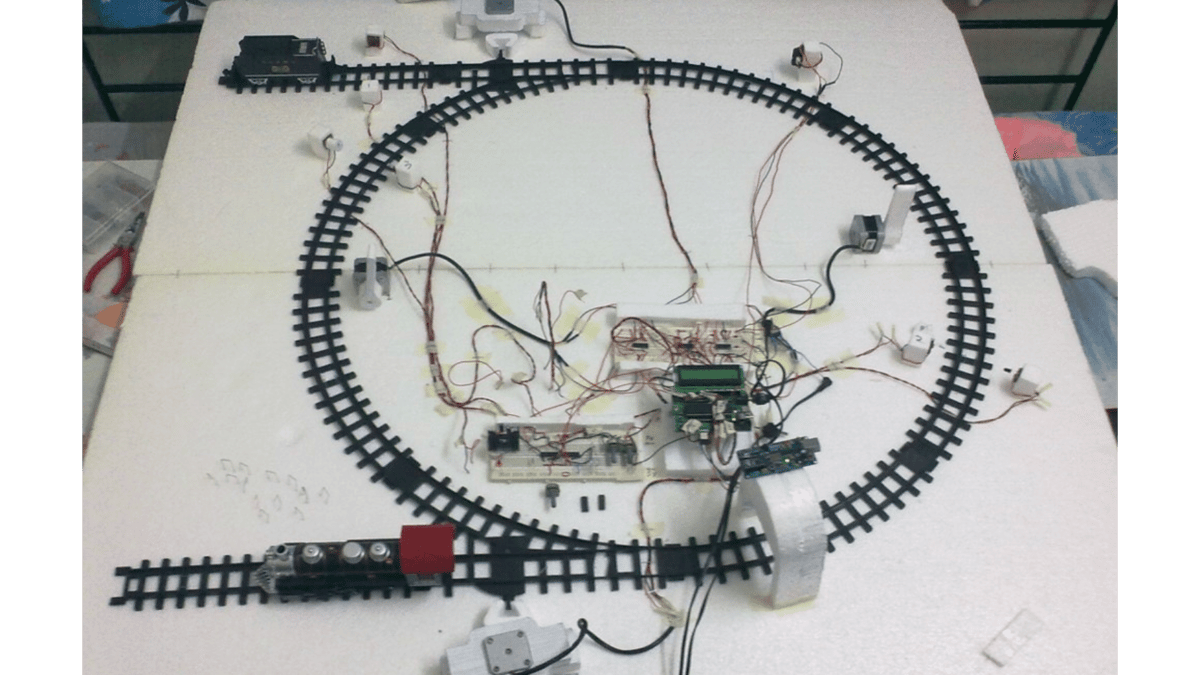
Intelligent Railway Control & Track Switching
The project is to design an intelligent railway gate control and tracking switching.The project is also programmed using PIC18F4580 using C language. All the information will be sent wirelessly through X-Bee to the PC.
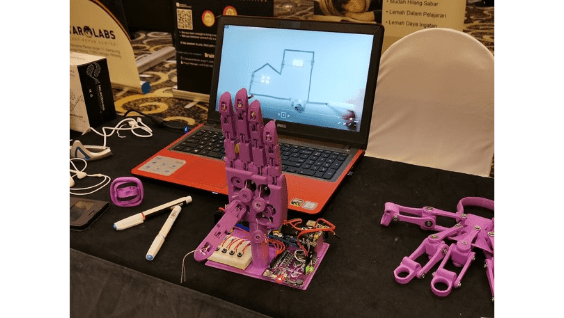
Robotic Arms
Design and develop a robotic arm from hardware design, electric circuit and programming.
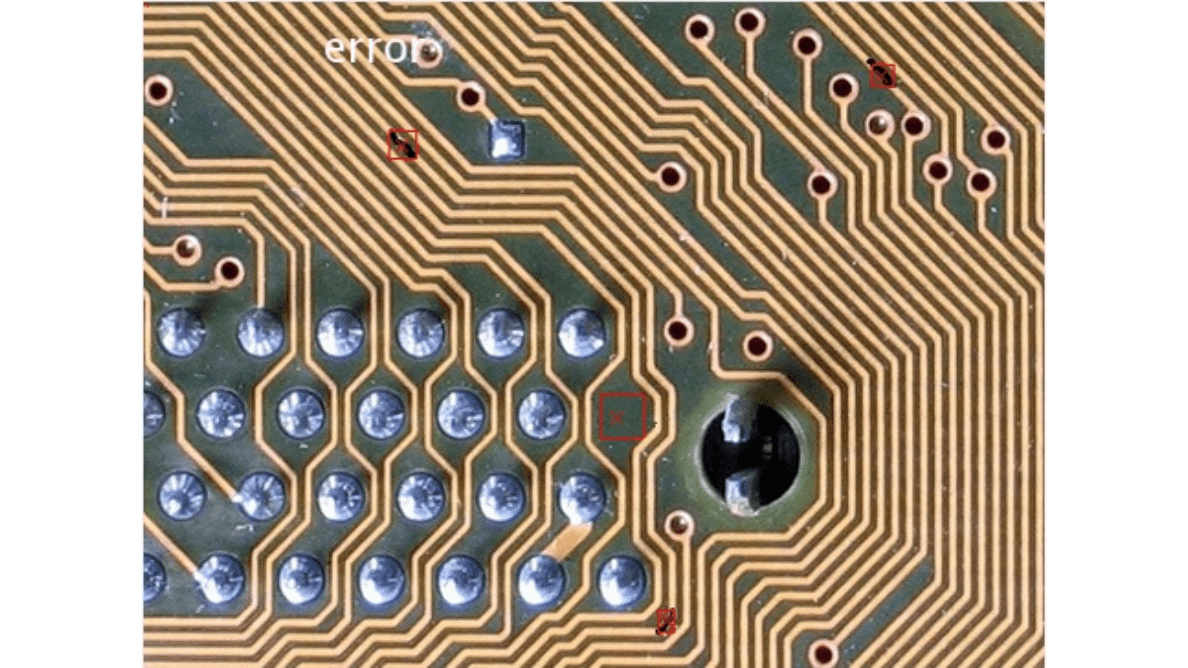
PCB Inspection Using Machine Vision
This project is design of smart machine vision (SMV) system to identified the damage of circuit board (PCB). This project is only completed using Matlab software which is one of the powerful mathematical toolbox program.
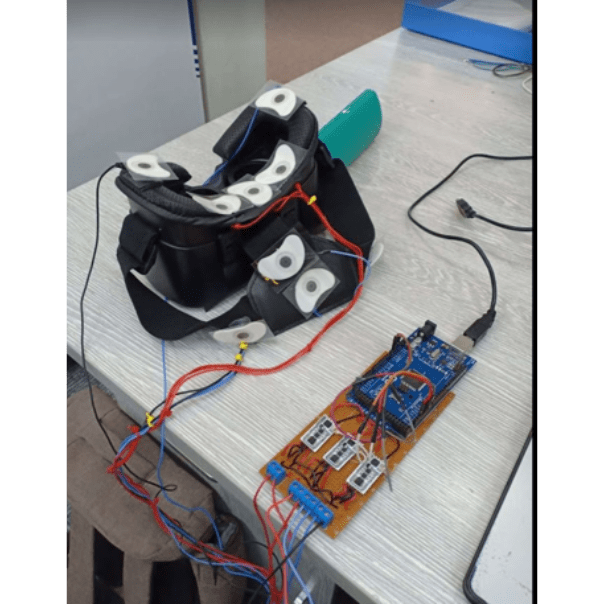
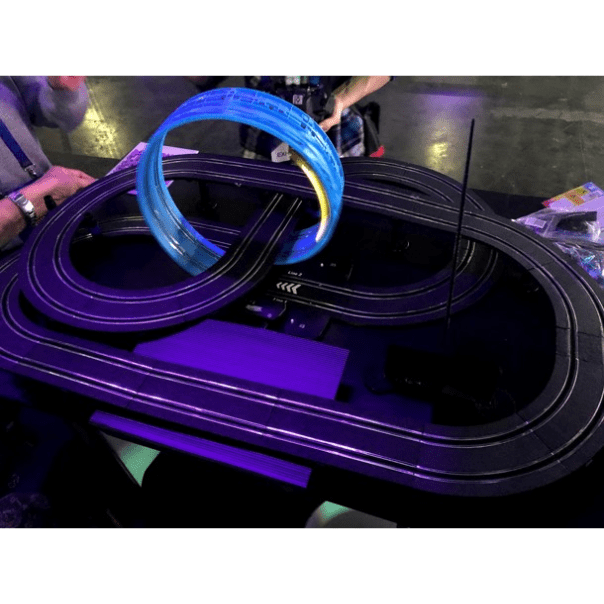
Mind Control Race Car
Mind Control VR for gaming
QRCODE SCANNER
RASPBERRY PI + OPENCV Wireless Power Transmission