鄭宇孝
Hardware Engineer
Taichung City, Taiwan
台中人,個性活潑開朗、逆來順受、喜歡學習新事物讓自己保持競爭力。交代的任務能獨立完成也能融入群體實現分工合作,所以我相信能成為貴公司裡不可或缺的角色。
從高中開始接觸自走車,大學專題自學Solidworks,用其製作了四軸機械手臂並結合了高中所學完成了可移動型機械手臂車,碩士兩年再延續大學所學製作了仿生機器魚,也申請了機器魚的專利,證書號I711516。且在這兩年內有與霹靂布袋戲、海科館合作的經驗。
進入華碩NB從事X86硬體架構近兩年,從量測入門,現今已負責繪製周邊線路以及小板的主own。
身為一個EE,跨部門以及與廠商con-call的機會不在少數,自認在與對方合作時能掌握分寸讓對方於公、於私都樂意幫助我以利案子順利進行。
Phone:(+886)987046408
Email:[email protected]
Work Experience
Oct 2021 - Aug 2023
Hardware Engineer.ASUSTek Computer Inc.
1. 使用OrCAD & Allegro 實現電路、Layout Review。
2. 善用示波器、TDR進行電源和訊號、阻抗完整性分析。
3. 澄清硬體相關問題並與團隊協商各種Solution。
4. 擅長跨部門、供應商溝通以促進流程加快解決問題。
Education

National Taipei University of Technology
Master of Science in Electrical Engineering
Thesis:Application of Pose Recognition to the Swimming of Bionic Robot Fish
2019 - 2021

National Chin-Yi University of Technology
Bachelor of Science in Electrical Engineering
Senior Project:3D Printer in four-axis Robotic Arm Vehicle control
2015 - 2019
Skill-i
Skill-ii
Language
- Deep Learning
- Matlab
- Python
- Arduino
- Solidworks
- Orcad
- Allegro
- Office
- English — Familiar
- Japanese — Studied
- Chinese — Native
Portfolios
NB Design
Sep 2021 - Present
進入華碩NB有參與過三個案子,負責了:
1. 負責過量測項目有I2C、SPI、TDR、ripple/noise、DCIR、eDP、HDMI。
2. 目前有負責過繪製主板周邊線路,例如:支援SD7.1規範的CardReader、Wifi 6e/Wifi 7、Audio以及小板。
3. 小板為FPCB,為華碩PC NB第一個導入需過hinge的設計。
4. 跨部門與SI team合作高頻音的實驗。
5. 負責蒐集新案子SI/PI結果,並依照不足的地方盡量調整Layout。
 ▲UP5302ZA
▲UP5302ZA
▲UX6404VI
仿生魚實驗
Aug 2019 - Aug 2021
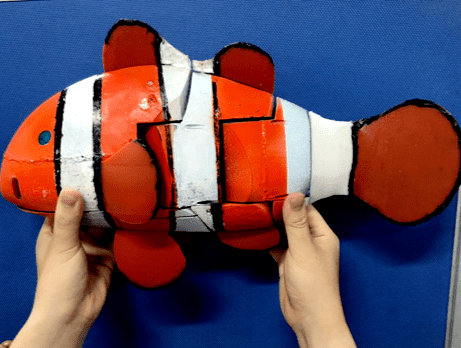
本代機器魚突破點如下:
1. 取消了手動量測真實魚類運動角度改用AI辨識並計算角度。
2. 取消使用麵包板接電路改用洗電路板方式使電路更穩定。
3. 傳輸方式改用LoRa實現無線傳輸,並使用搖桿或手機方式遙控。
4. 以小丑魚1:1為模型放大重新設計機器魚機構。
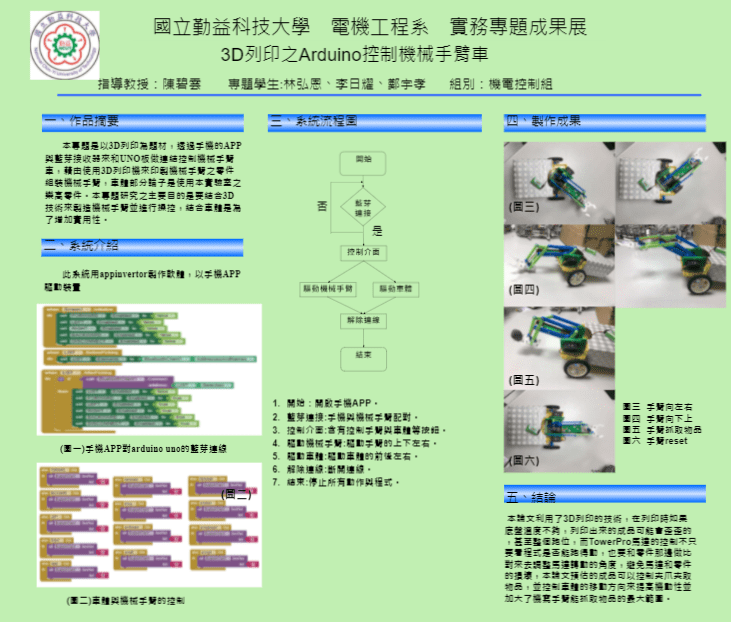
3D列印之Arduino控制機械手臂車
Sep 2017 - Jul 2018
本專題負責區域如下:
1. 與廠商Con-call修理3D Printer。
1. 自學Solidworks憑著一己之力做出使用3D列印機印製的四軸機械手臂。
2. 延續高中所學的自走車知識,製成了以使用arduino uno為控制晶片,搭配IDE:APPInvertor可藉由手機當作controller控制的專題。
仿生魚實驗
從繪製模型到設計電路再到控制電路,一路上吸收著學長姐的知識,在碩士的第二年自己一個人製作了全新的機器魚。
碩士時期使用Solidworks以小丑魚1:1模型放大繪製機器魚,使用深度學習及使用傅立葉級數(Matlab)來模擬真實魚類的游動並使用ESP32 晶片控制來實現仿生運動控制、以及使用LoRa來實現無線傳輸。
海科展覽
2020/11
曾受邀至國立海洋科技博物館展覽機器魚以及後續的維修工作。
天馬線上直播訪談
本實驗室使用天馬公司的光固化3D印表機,該公司得知後提出想與我們拍攝一個線上直播的訪談。
SOLIDWORKS全球
Digital Media大獎第一名
來到實驗室的第一年就受邀SOLIDWORKS公司的亞洲團隊要來替我們的機器魚做一部影片,我跟學姊一起製作機器魚機構的部分,學長負責電控的部分,馬來西亞來實習的同學負責使用SOLIDWORKS的模擬,並在最終獲得了第一名的佳績。
社團經歷
Dec 2015 - Jul 2019
大學四年只參加國際志工社,因為我喜歡小朋友。
2016/01 參與寒假營隊至偏鄉當隊輔教小朋友課程及跟小朋友一起玩耍。
2017/07 參與暑假營隊至偏鄉當生活長及機動長為工作人員處理三餐及處理突發狀況。

