王文宏 Kris
目前從事慣性感測器 Inertial Sensor 演算法開發的軟體工程師,有六年以上相關經驗,是一個喜歡設計,喜歡寫程式,喜歡接觸各種新技術並樂於分享的人,熟悉微控制器、感測器及其相關應用,能從硬體設計到韌體驅動撰寫與演算法開發,業餘時間會做些小專案,學習新工具與程式。
#喜歡嘗試新事物 #有創意想法 #專業務實 #認真盡責 #分享知識
Taipei City, Taiwan [email protected] 作品集
Work Experience
希恩體感科技股份有限公司 CyweeMotion Inc.
資深軟體工程師 • Jun 2021 ~ Present
廠端應用端的 IMU 感測器校準、球類運動相關動作識別演算法開發、時間序列資料標註工具、行人航位推算 Pedestrian Dead Reckoning (PDR) 演算法開發優化、GitLab CI/CD 算法運算資源計算、Web Services
#C #Python #IMU #Sensor #SensorCalibration #MachineLearning #CI/CD #Linux

愛盛科技股份有限公司 iSentek Inc.
資深工程師 • Jun 2017 ~ Mar 2021
慣性感測器 Inertial Sensor、磁力計 eCompass 姿態融合演算法與校準演算法開發,MATLAB 模擬分析,客戶校準相關問題支援與協助
1. 維護、優化與改良磁力計軟硬磁校準函式庫
2. 磁相關感測器的演算法開發與模擬,應用於 VR、無人機等知名品牌大廠產品
3. 九軸慣性感測器的姿態融合演算法開發
4. 基於磁感測器的相關應用模組設計、開發,並實際出貨導入至客戶產品中
5. 無人機、智慧手機、消費電子... 等等室內外相關應用的磁力計校準與干擾分析
6. 撰寫 Android App 輔助客戶除錯與測試,加速項目導入效率
#C #Matlab #IMU #MEMS #Sensor #SensorCalibration #SensorFusion #Firmware

財團法人資訊工業策進會
短期顧問 • May 2017 ~ Jun 2017
基於超寬頻 Ultra-wideband 室內定位之倉儲系統原型系統設計與實現
1. 對工作單位介紹超寬頻定位系統之概念與個人室內定位研究
2. 應用於倉儲管理之定位系統架構設計建議與規劃
3. 定位裝置硬體設計、驗證與微控制器韌體功能撰寫
4. 基於 MATLAB 的定位演算法開發
5. 實現大場域情景的多區域定位切換方法,於停車場場域初步功能驗證
#C #Matlab #UltraWideband #IndoorPositioning #MCU

Education
中原大學 Chung Yuan Christian University
碩士 電機工程學系 • 2014 - 2017
碩士論文 基於超寬頻測距與慣性感測器之室內定位系統
本研究提出了一種基於超寬頻測距與慣性感測器的室內定位資訊融合方法,基於卡爾曼濾波器來融合慣性感測器、超寬頻,透過慣性感測器來減少環境影響、平滑定位結果,同時也使用超寬頻測距資訊來抑制慣性感測器的誤差累積,實驗結果表明提出之方法在室內環境中固定軌跡運動與循跡控制,可以有效補償定位距離偏移以及抑制誤差累積。

Achievement
2015 通訊大賽 自行車車輪照明系統(佳作)
三人團隊,主要負責整體電路設計、韌體撰寫與車輪轉速與位置估測
為了增加騎車體驗與保障安全而設計的作品,為了更加完善自行車的騎乘體驗與安全,借鑒了視覺暫留的概念,實現了一個安裝於車輪框,朝行車前後方向照明的車燈裝置,除了照明亦可透過車輪轉速估測來實現剎車警示功能,整體安裝簡潔、容易客製化,搭配穿戴式裝置更可以實現人車互動、防盜警示的效果。
Blog: https://kris-wang.notion.site/WheelLED-b2447d48e9b54e2986aa46b73e6297ca
2013 電機系專題競賽 四軸飛行器(特優)
大學物理系輔系電機時,跨系參加電機系的實作競賽的個人專題,為期約一年,專題內容為實現一台自主懸停的四軸飛行器,工作內容包含飛控板、遙控器的硬體設計實現、雙向無線通訊、無人機姿態估算與平衡控制的演算法開發。
Skills
慣性感測器 IMU Sensor
- 熟悉加速度計、陀螺儀與磁力計的校準演算法
- 熟悉訊號處理濾波算法與分析方法
- 豐富的慣性感測器應用經驗,包含姿態估測、運動識別、室內定位輔助等
機器學習 Machine Learning
- 時間序列的特徵擷取與分析經驗
- 基於 Python Scikit-learn 的訓練與實現
- 多種揮拍類運動的動作識別開發經驗
Python 程式開發
- 熟悉 Pandas、NumPy、Matplotlib、Plotly
- FastAPI、Jinja2、Bootstrap 前後端建置經驗
- Ctypes 連接 C/C++ API 應用經驗,加速運算效率
MATLAB 程式開發
- MATLAB 模擬與訊號分析經驗
- 熟悉 MATLAB 基本程式撰寫以及部分 Toolbox
- 接通 MCU 硬體,將資料實時傳輸到 MATLAB 上分析
嵌入式系統開發 Embedded System
- C / MCU / SoC 多個專案開發實作經驗
- 熟悉 STM32、NRF5x 等 Cortex-M 系列微控制器
- 熟悉 MCU/SoC 周邊硬體介面,如 I2C、SPI、UART
- 能依 datasheet 撰寫對應韌體,驅動芯片或模組
硬體電路設計
- 基本硬體電路測量與除錯能力
- 豐富的 PCB 設計、Layout 與焊接經驗
- 熟悉示波器、電表等測試除錯儀器的使用
- 手動能力強,能依需求設計、實現對應功能 PCB
其他
- Android App 撰寫經驗 (Java, JNI)
- WSL2, Linux, Make, CMake, Git, Gitlab CI/CD 經驗
- Least Square, Kalman Filter, ...
Portfolio
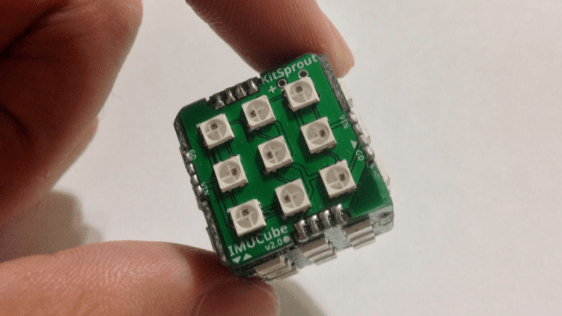
IMUCube
IMUCube 是一個 IMU, RGB LED 和 BLE 的創意開發嘗試,由六片 PCB 組裝而成,PCB 上包含 nRF51822(微控制器)、MPU6500(三軸加速度計、三軸陀螺儀)、WS2812B(One-Wire RGB888 LED) 組成,內部安裝小型鋰電池與開關,可以獨立供電與接線充電,實現類似無線電子骰子的功能。

WheelLED 自行車燈
WheelLED 是一個自行車的照明系統,有別於市面上的自行車燈,將車燈裝置於車輪框上,並以機構設計方式讓 LED 燈可以向前後方向照明,藉以實現行車照明與煞車警示的功能,整體設計可以分成 LED 照明、慣性感測器轉速位置估測算法以及手勢體感控制三大部分,機構與電路板皆集成於輪框上,車身上不需要安裝任何東西,設計簡潔乾淨與智能。
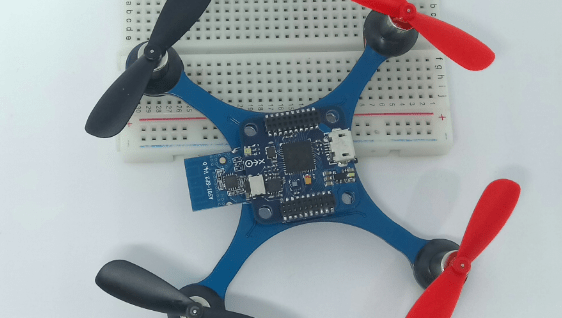
QCopterNano
QCopterNano 是一個基於 Cortex-M4 的微型四軸飛行器,馬達軸距 80mm,含電池重量約 30g,飛控採用具有9DOF慣性感測元件與高效能的微控制器,透過nRF24L01P 來做無線的資料傳輸、遙控。