
温峻岳
愛好是運動、機電整合、交朋友。
高中是(新北高工)電機科,現在是(虎科)車輛工程系一年級。
同時跨足電機與機械,並且在我手中完美呈現,是最終目標!
[email protected]
(09)75-281-990
新北市,永和區
Skills
資電基礎
Arduino應用
高二、高三時拿來做專題,沒事的時候也會拿它來做一些小實驗。有用過Nano、Mega、UNO的經驗。
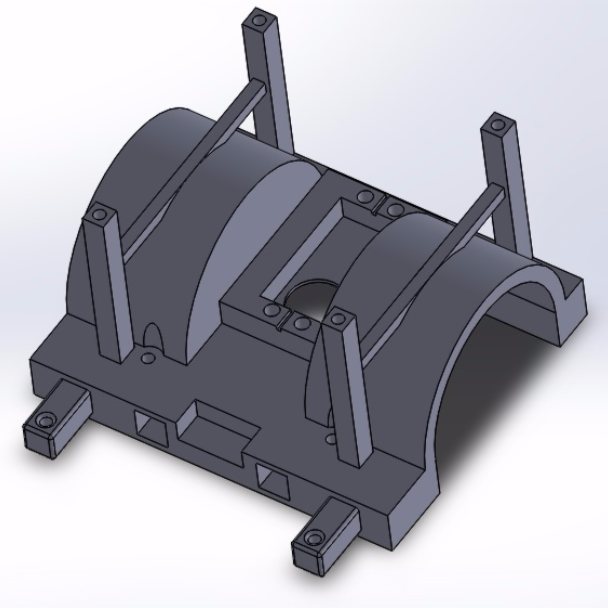
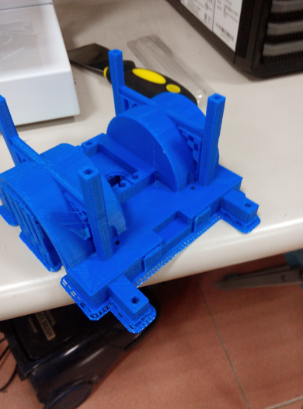
3D列印
會使用soliworks和123D的基本指令繪圖,曾經載北部的maker基地玩過,電機科的up plus2最熟悉,用過的耗材只有pla和abs。
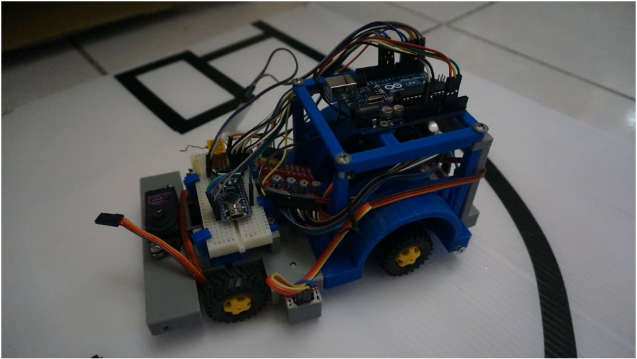
瘋狂爆走車
高二的時候為了瞭解Arduino的用法,就用做車子當主題,進而開始研究。
起初拿冰棒棍當連動桿、木板當車架就想開始做,但每個簡易的手工零件間的連結都非常晃,導致整體的穩定性很低;因此,我開始想...最近正ㄏㄤ的3D列印應該會是更好的選擇,剛好寒假時電機科的3D印表機沒人在用,我就找了同學合夥買耗材、畫藍圖、做專題!
專題資料夾傳送們<請點擊左側文字
3D列印
當我的全手工零件失敗後,我和另一名同學在寒假期間,花一週的時間完成基本車子結構與測試;其中包含了 : 空想藍圖、量測物件的尺寸、繪圖、打印、測試模型誤差值、整車組裝實測。用過了三種印表機,其中的up plus 2是我最喜歡用的,他的穩定度是最高的,雖然其他的列印範圍比較廣,但是中途出錯率太高了,經常重新開始印,是令人非常討厭的一件事!


小論文與專題
一開始我做的是自動倒車系統,但老師看了覺得太單調乏味!叫我改成會循跡的車子,後來又叫我改成自動送餐車。
在修改的整個過程,我們除了加入循跡模組,控制器還變成兩塊(一個mega板一個nano板),mega板控制藍牙、伺服馬達(轉向)、循跡模組、超音波模組(避障)、給nano板訊號,nano板在接收到訊號之後,控制後輪動靜與正反轉。
這項實驗有參加過校外的小論文比賽,獲得了優等。還參加過校內的專題製作比賽,獲得了佳作。

四軸飛行器(UNO當飛控板)
高三雖然是個為了統測而衝刺的年齡,但我們心中還有一項未完成的夢~四軸 ! ! !
就在高二剛結束即將衝刺的暑假,有一位同學突然問我說要步要做這項專題,一開始我是覺得這根本是天方夜譚,想要做起來需要大量的腦力與財力才有辦法起步,沒想到後來竟然揪到了八人之多,每個人都繳了1.2k當作實驗費。起初的我們連電力系統的供應方式都沒清楚,就傻傻地按照原本PWM的接法處理,結果造成了一堆難以解釋的突發狀況,幸好有在玩四軸的老師糾正了我們的實驗方向,才得以有了突破性的進展。
整個實驗過程,從一起飛就翻車到平衡一段距離才撞牆,在別人眼裡只是個失敗的作品,但在一路上我們學到了很多東西,不管是電變的控制,還是馬達的特性,亦或是程式的撰寫,都有了很多難以忘去的心得。
到畢業為止我們都還沒突破就是電子羅盤、陀螺儀與Arduino板之間的關系,pitch、row、yaw的數值跳動還有Arduino板在記錄數值或回傳數值時會造成暴衝,這些問題都好想要在近一步地去了解,但因為大家一畢業就分道揚鑣,暑假我出國(留學+自由行)一個月,開學後大家也都各奔東西南北,有機會的話想在未來繼續專研。
毫無流體力學的一群人
當初在接馬達的線路時,連正反轉的馬達要怎麼擺設都不知道,但現在的我有了一些相關的基礎。這張圖是在測試如何控制順逆時鐘自旋,我們把馬達分成順時鐘組與逆時鐘組,調整一對馬達兩邊施力的強度比,等到到兩對都調好之後,再依照各自的轉速比去增減兩組織間的相對轉速,進而達成觀察自旋程度的條件,這裡就是我們最花時間的地方,結果到了快畢業才找出最接近的數值,過程中還不知道什麼原因竟然燒毀了一顆馬達,這個燒錢坑真的讓我們幾個高中生QQ。要找出四顆馬達穩穩飛行的公式真的需要一定的基礎與精力才做得來的呀!

現行目標
研究自動平衡車原理
並把它直接在我手上實現
最終做出手機遙控的自動機車
想來挑戰不倒翁的極限,壓車壓到最酷的境界
志工之義務
1.排班顧守
2.環境整潔
3.簡單設備養護
4.如果有能力的話想來挑戰課程教學
時間安排
對於未來會接幹(溜冰社)的我,禮拜二固定是社課時間,所以一定沒辦法到。
還有即將淡出系學會的我,這一個月會比較忙,所以最近的空閒時間很少,在此先說聲抱歉,尤其是3/29系烤,所以那天沒辦法面試。
