
胡珮琪
我有利用Python開發樹莓派自動倉儲系統的經驗,與團隊從機構設計、QR code掃描進出貨、馬達控制、網站架設、即時資料庫更新,喜歡團隊合作,喜歡分享新知識,互相交流、學習彼此擅長的領域,一起進步。
另外,也有利用Arduino與LabVIEW設計一台腦波控制輪椅的經驗,四足機器人競走、乒乓機器人競賽、KNRm機器人影像尋標、紅外線與超音波避障的經驗。目前正參與由 Intel NUC、Jetson nano、STM32 組成的無人車計畫,曾參加 2022第17屆戰國策全國創新創業競賽 以及 2022 NYCU 創新創業競賽,在這專題中熟悉 Linux Ubuntu、ROS & ROS2、STM32CubeIDE。
曾擔任2019交大機械與外文聯合迎新宿營的副召,帶領84位活動夥伴一起舉辦,共有85位新生一同盛舉三天兩夜迎新宿營,負責安排行程與宣傳、場刊活動地點、驗收活動項目、收支管理,並從中學習如何當總召與其他夥伴的溝通橋樑,凝聚向心力。另外,曾經擔任第33屆交通大學抓馬盃的公關長,負責與廠商聯繫、執行贊助合作企劃,並舉辦12次網路抽獎活動與比賽現場抽獎。
Taiwan [email protected]
學歷
2018 - 2022
國立交通大學 National Chiao Tung University
機械工程學系,電機工程學系
技能
作業系統
- Windows
- Mac OS
- Linux Ubuntu
- ROS
- ROS2
開發工具
- Arduino IDE
- STM32CubeIDE
- VS Code
- Unity
- MobaXterm
- Git
- Matlab
- LABVIEW
- SolidWorks
- MySQL
- Django
開發版 / 主機板套件
- STM32
- Intel NUC
- Jetson nano
- Raspberry pi
- Arduino
程式語言
- C/ C++
- Python
- HTML
- CSS
- PHP
語言
- English — 進階
- Chinese — 母語或雙語
專題經驗
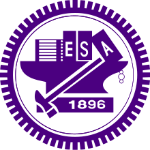
Automated Storage and Retrieval System with Shuttle and Quick Response Code
應用二維條碼與多穿梭檯車之自動倉儲管理系統
九月 2020 - 十二月 2021
這是一套使用 QR code 作為媒介且有多穿梭檯車的自動化無人倉儲系統,使用 QR code 即可進出貨,整套系統是建立在樹莓派,僅用一台樹莓派作為主機操控整個倉儲系統。
我們在此系統的軟體方面,運用 PHP、MySQL、HTML、Python 等多種程式語言,使系統除了一般倉儲系統本來就有的 GUI 圖形介面外,並且同時具備線上監控網頁。
在程式方面,利用 multi-processing 和 multi-threading 使系統的各部分動作(輸送帶、手臂、升降梯、暫存區、棧車)可以同時進行、不需等待,利用OpenCV模組使得鏡頭可以掃描QRcode,進行進貨、或是找到對應貨物進行出貨程序,因此此系統可以持續不斷掃QRcode排程,節省時間成本。
參賽結果
- 榮獲台灣精密工程學會舉辦的110年精密工程專題與論文獎-佳作
- 2021陽明交通大學機械實作成果發表競賽-第一名
十月 2022
撰寫英文論文 Multi-shuttle Automated Storage and Retrieval System with Quick Response Code 投稿 2022 CSME 中國機械工程學會的學術研討會與論壇會議論文
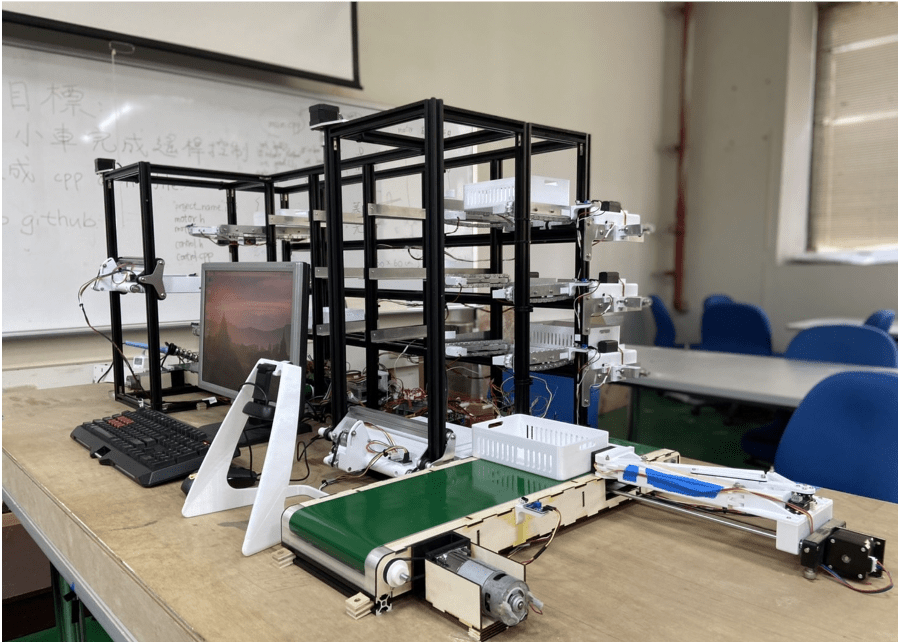
四足機器人競走與乒乓機器人競賽
課堂競賽
九月 2021 - 十月 2021

運用 Lego Mindstorms 組裝出一台機器人並利用 Lego NXT 軟體撰寫程式控制馬達。
四足機器人透過左右腳不同步使機器人向前移動,用最少的零件減輕機器人負擔,另外我們在前腳套上粗輪胎皮增加摩擦力,增加行走速度。
乒乓機器人需要將自己場地內的乒乓球收集起來,並推向對方的場域,利用光感測器判斷我方與敵方場地。同時利用超音波感測器判斷競賽場地的邊界、敵方機器人,以免兩方機器人互撞。

Prototype of Using Dc motor to drive wheelchair through EEG signal
九月 2021 - 一月 2022

Cloud Service of distributed robotic application in Health Facility
雲端分散式照護型機器人
十二月 2021 - 十月 2022
由 STM32, Intel NUC, Jetson nano 組成的無人車,搭配兩顆 RPLidar 置於斜對角與前方的 ROS深度攝影機。底部輪子設計為四舵輪系統,因此車子可向全方位移動。
車子系統主要建立在 ROS 和 ROS2 上,利用 Cartogrpher 完成 SLAM,並將兩顆 Lidar 地圖掃描資料合併,再搭配 IMU 做更精準的定位。另外,ROS 和STM32 利用 USB串口模組和 Pyserial 傳輸鍵盤指令,STM32根據指令控制馬達往指定方向移動。
Github (ROS keyboard control STM32)
創業競賽
- 2022第17屆戰國策全國創新創業競賽
- 2022 NYCU 創新創業競賽
工作經歷

數學輔導老師兼班級導師(國中/國小) • 曙光教育事業有限公司
六月 2018 - 九月 2018
主要工作為30人的國中數學班級導師、20人的國小數學班級導師,負責出考卷、輔導進度落後的同學。
國小數學輔導老師 • 曙光教育事業有限公司
六月 2015 - 九月 2015
輔導國小數學班進度落後的同學,檢討考卷、幫忙引導作業題。
活動經歷
2019 交大機械&外文聯合迎新宿營
副召
- 統籌 160位三天兩夜大學迎新宿營
- 負責安排行程
- 宣傳場刊活動地點
- 驗收活動項目
- 收支管理
第33屆交通大學抓馬盃
公關長
- 舉辦12次網路抽獎活動、比賽現場抽獎
- 執行贊助合作企劃
- 與廠商聯繫
