- Jobs
 ResumeCreate your job-winning resume using our free resume builder.
ResumeCreate your job-winning resume using our free resume builder. PortfolioShowcase your skills and projects with a professional portfolio.ResumeCreate your job-winning resume using our free resume builder.Resume BuilderMake a resume for free.Resume TemplatesAccess our extensive library of professional & ready-to-use templates.Resume ExamplesGet inspired by real resume examples to create your own.Occupation GuideAccess resume writing guides tailored for different professions.Resume HelpGet expert advice on all things resume from our team of recruitment specialists.
PortfolioShowcase your skills and projects with a professional portfolio.ResumeCreate your job-winning resume using our free resume builder.Resume BuilderMake a resume for free.Resume TemplatesAccess our extensive library of professional & ready-to-use templates.Resume ExamplesGet inspired by real resume examples to create your own.Occupation GuideAccess resume writing guides tailored for different professions.Resume HelpGet expert advice on all things resume from our team of recruitment specialists.- ResourcesSuccess StoriesBusiness ExcellenceAbout CakeResumeFeatured Reads
- Hire
- Download our App



專題競賽四軸飛行器

專題競賽四軸飛行器
Software Engineer
・
Taipei City, Taiwan

May 2012 – Jun 2013
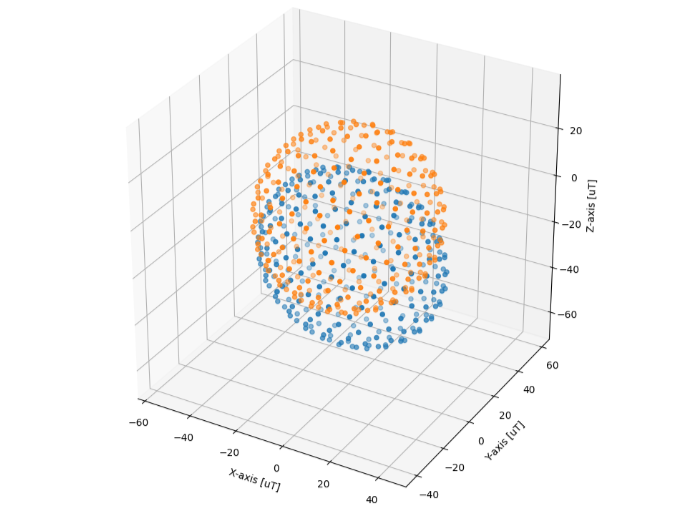
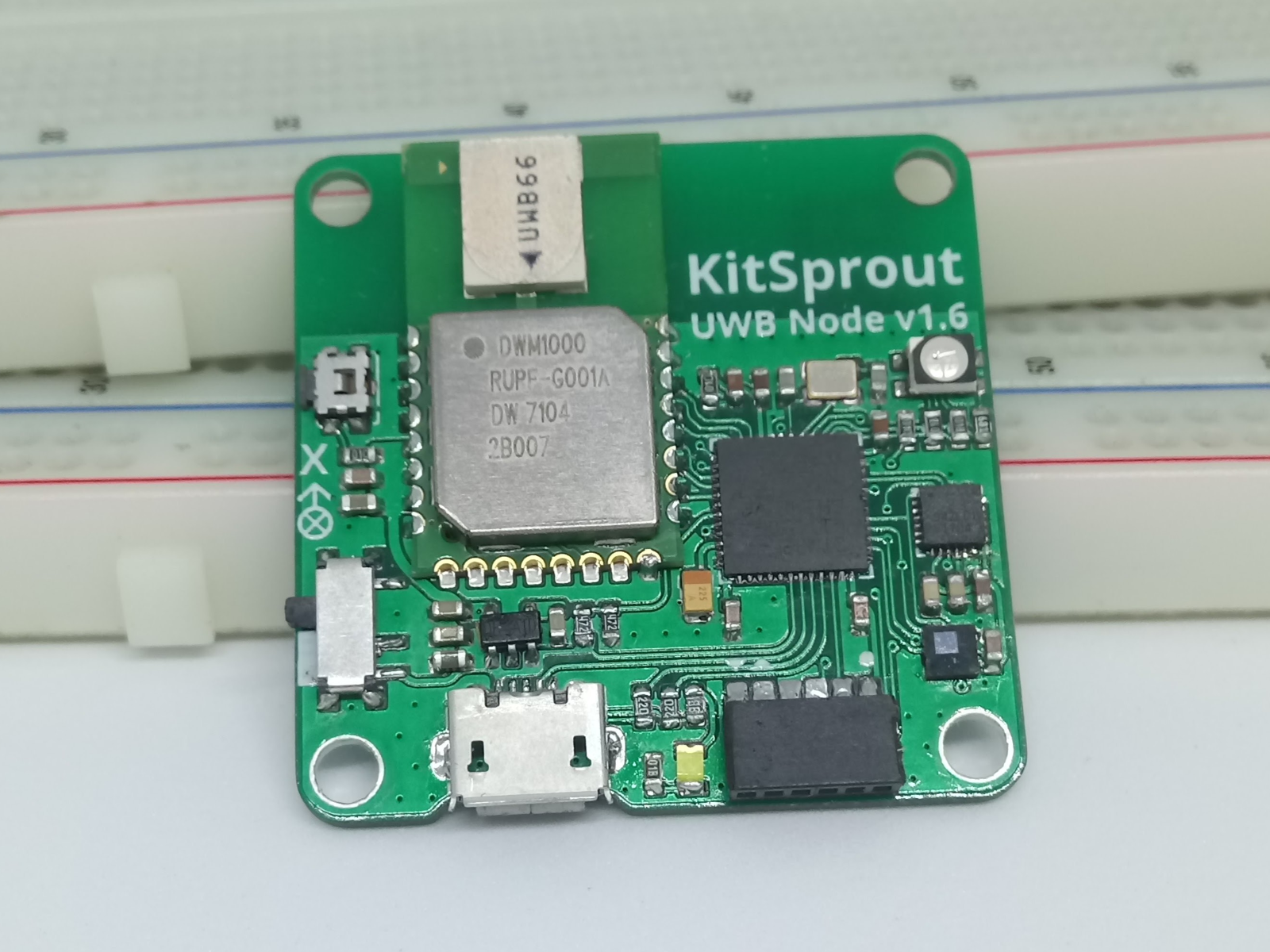
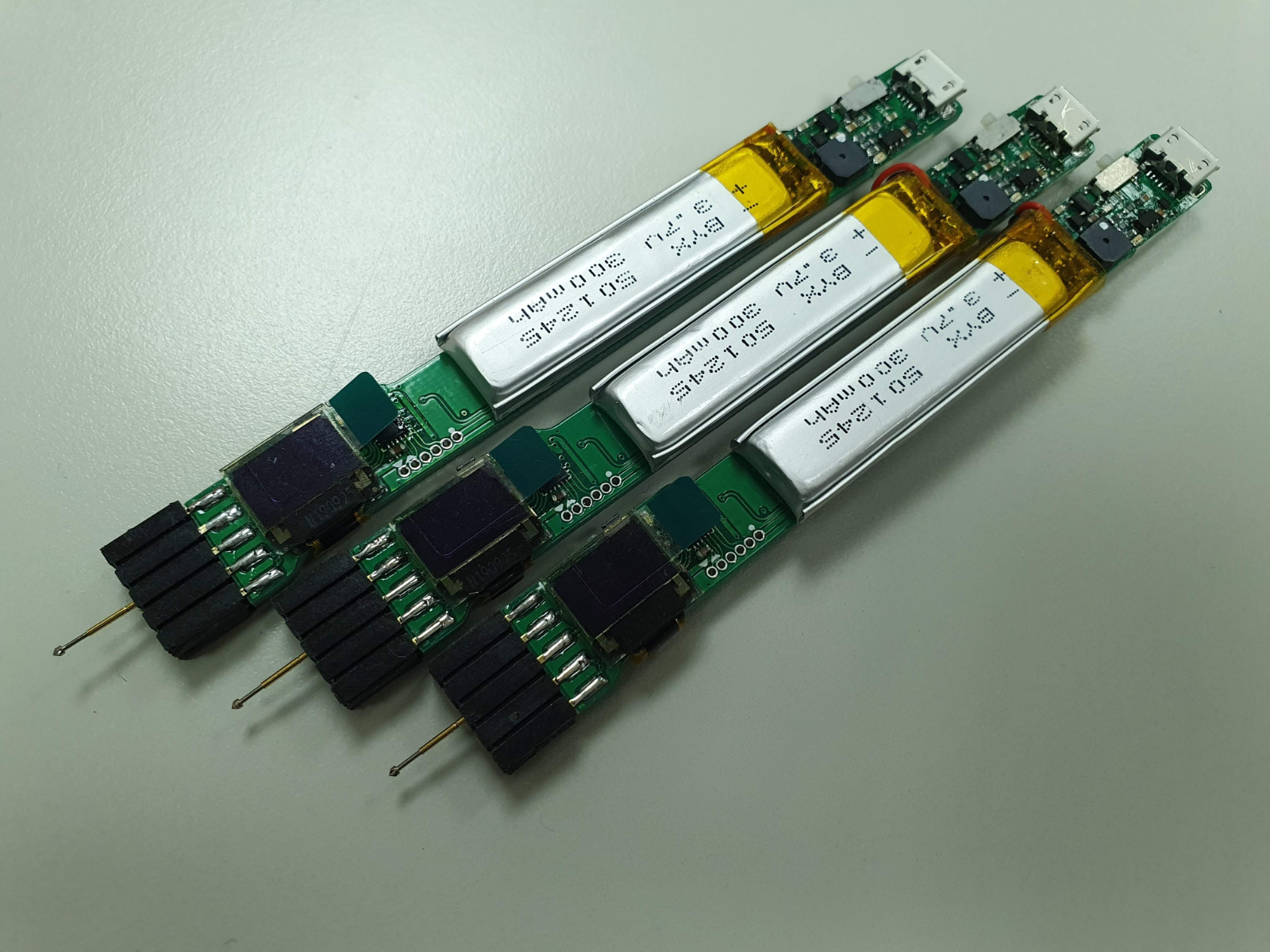
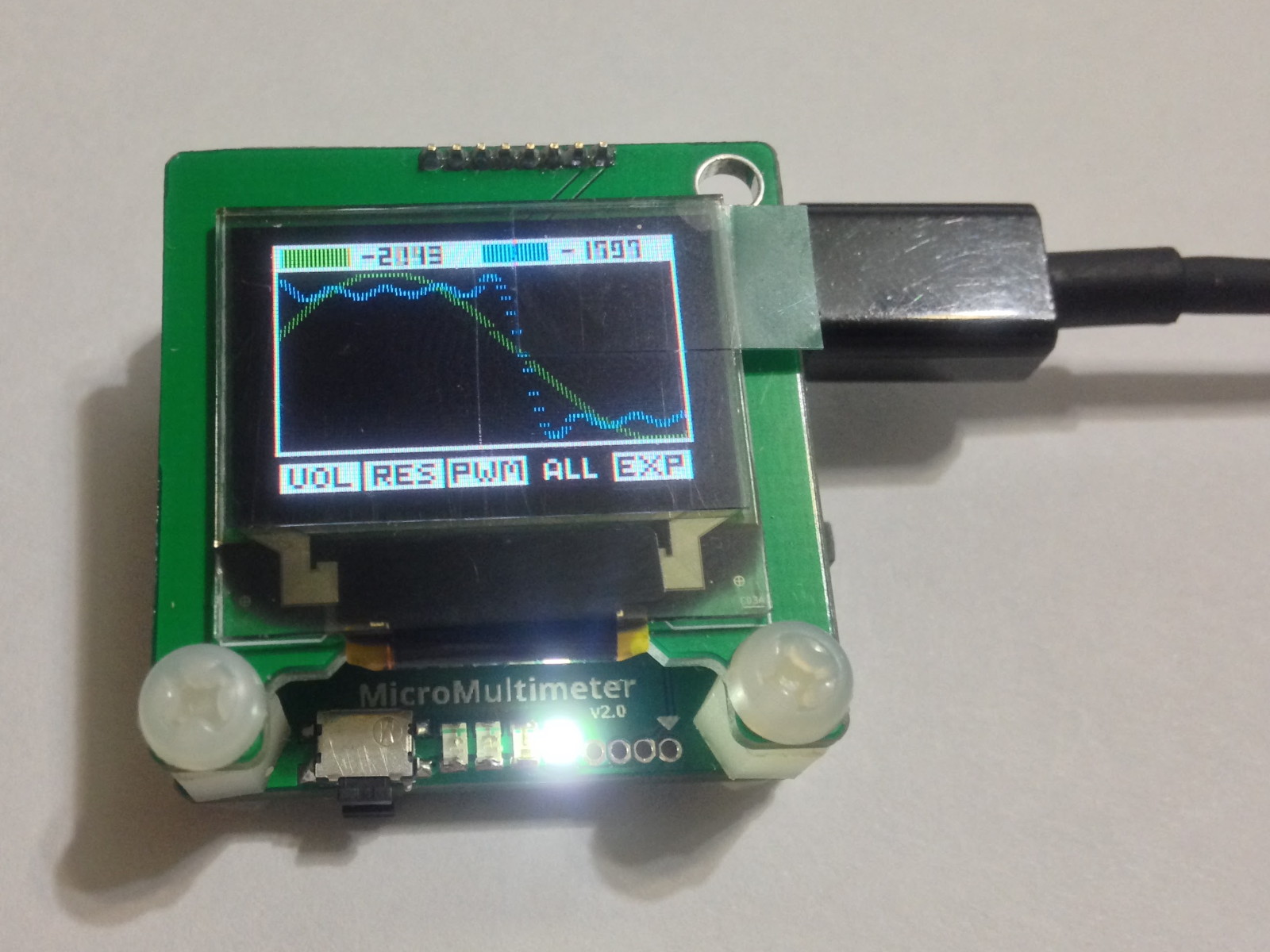
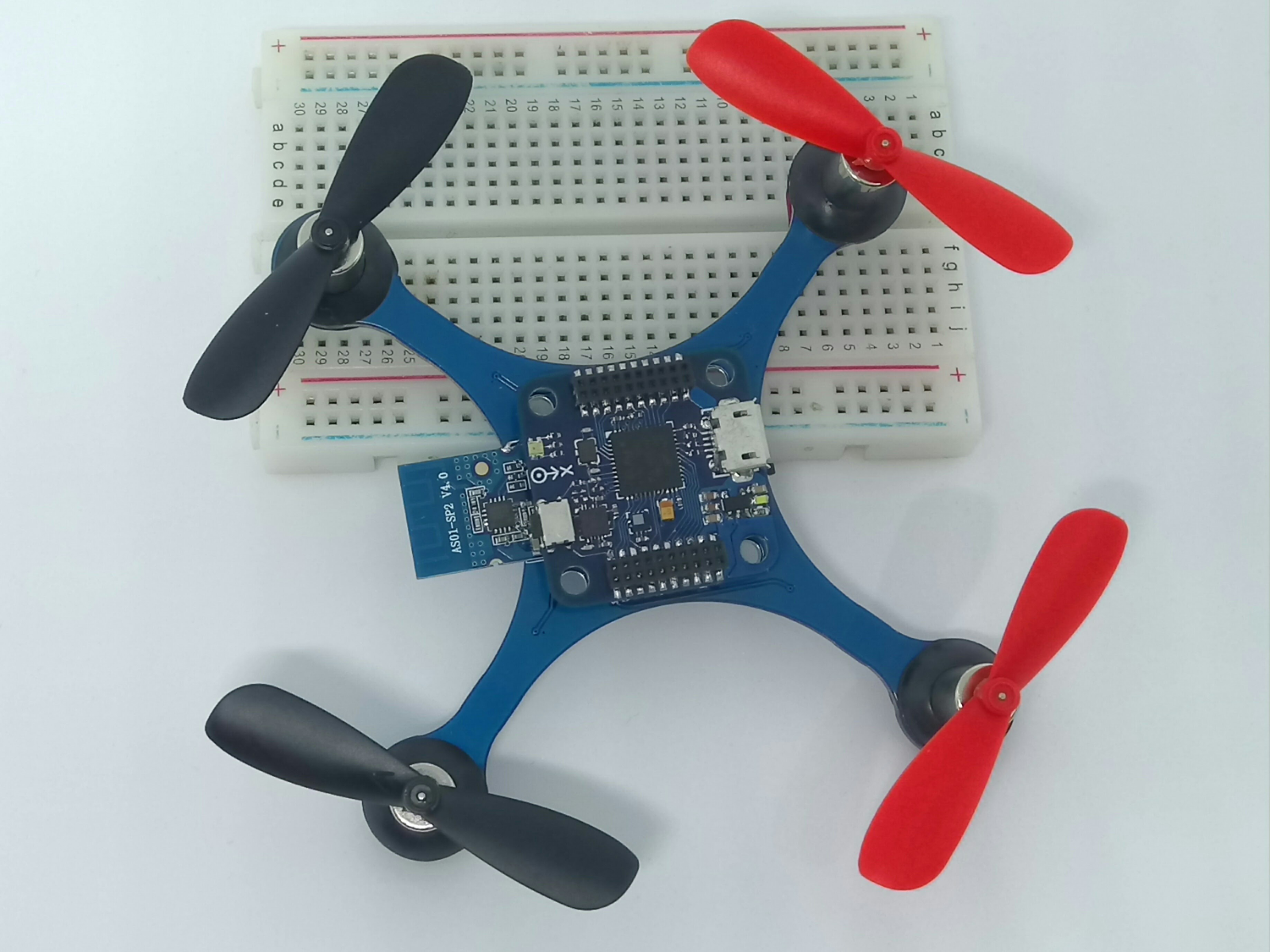
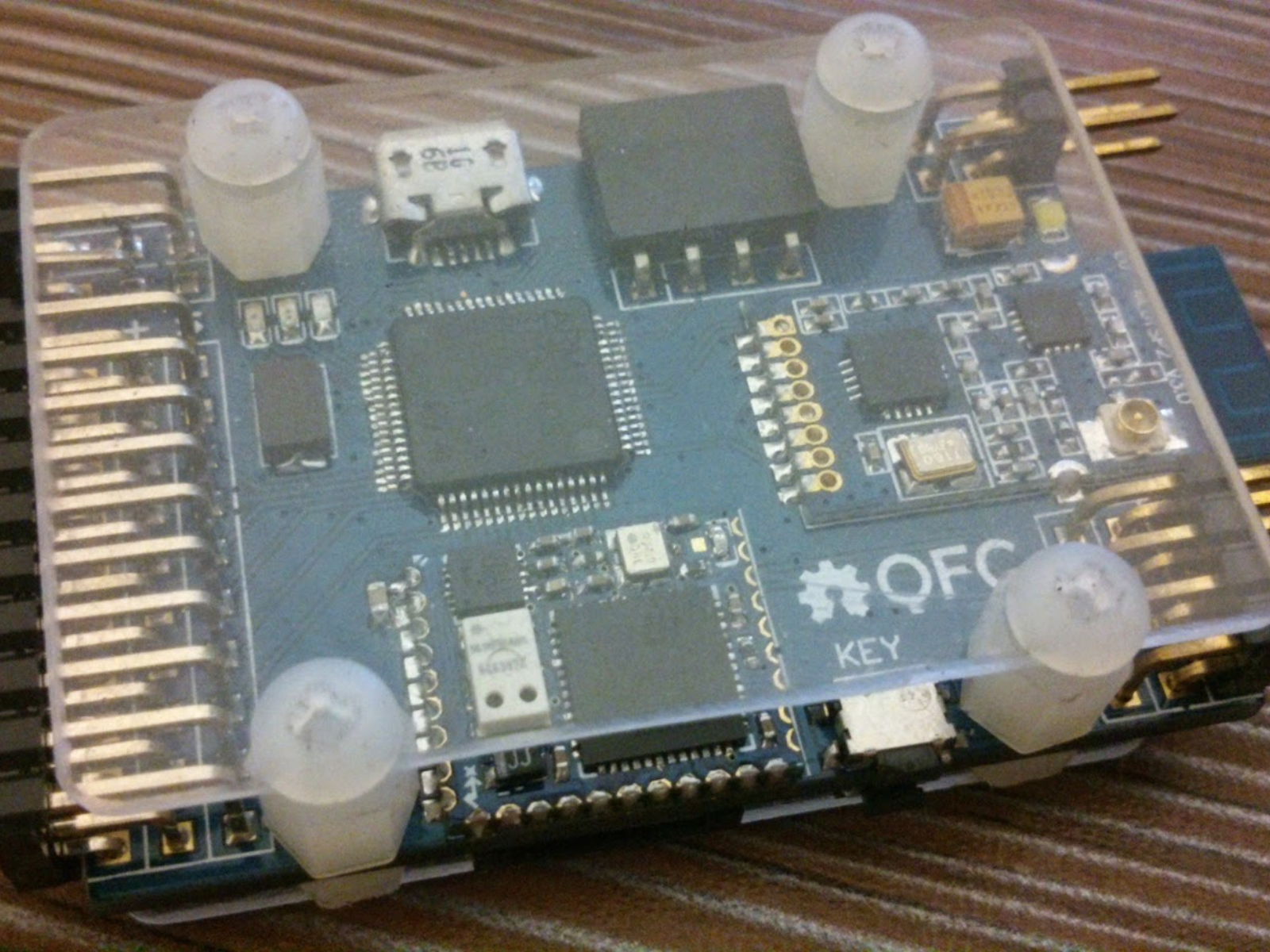
本專題主要目的為建立出能自主懸停的四軸飛行器,並藉由自製的監控平 台來做調整及控制。專題進行過程首先了解四軸飛行器的結構組成及飛行原理,再對無線傳輸模組及無刷馬達做控制,以及感測器讀取與濾波,最後計算飛 行器姿態與自主平衡控制。
這是在完全沒有航模相關知識的情況下學習、製作,從遙控器、飛控板的製作、焊接、程式韌體的撰寫,到演算法的實現與平衡控制,控制主要使用STM32F4 系列的微控制器,最後的實作結果可以大致保持平衡。
https://github.com/Hom-Wang/Quadcopter
Please login to comment.