專題競賽四軸飛行器

專題競賽四軸飛行器
Software Engineer
・
Taipei City, Taiwan

May 2012 – Jun 2013
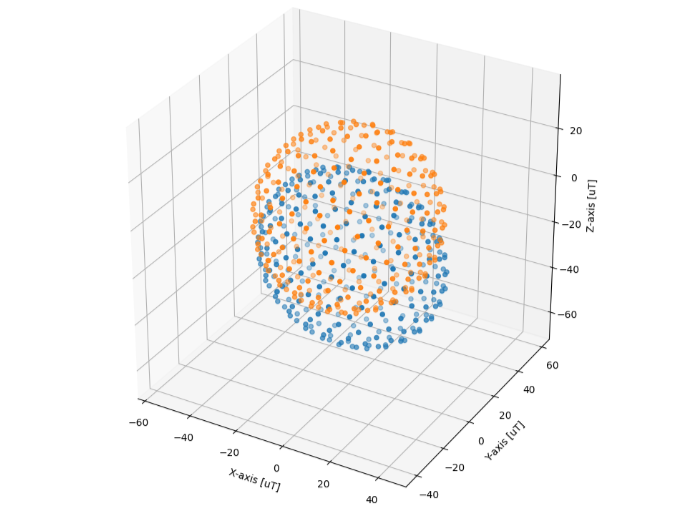
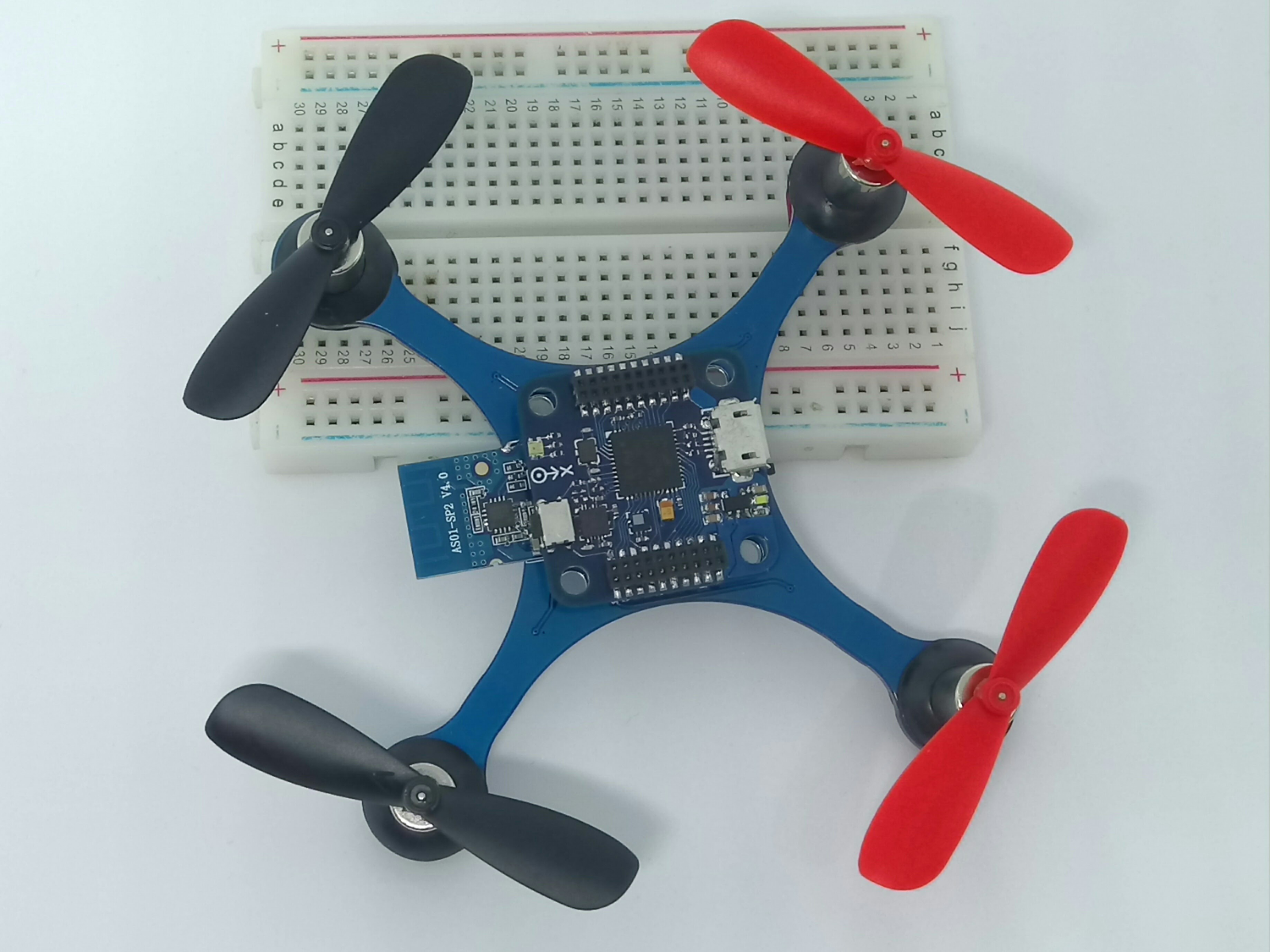
本專題主要目的為建立出能自主懸停的四軸飛行器,並藉由自製的監控平 台來做調整及控制。專題進行過程首先了解四軸飛行器的結構組成及飛行原理,再對無線傳輸模組及無刷馬達做控制,以及感測器讀取與濾波,最後計算飛 行器姿態與自主平衡控制。
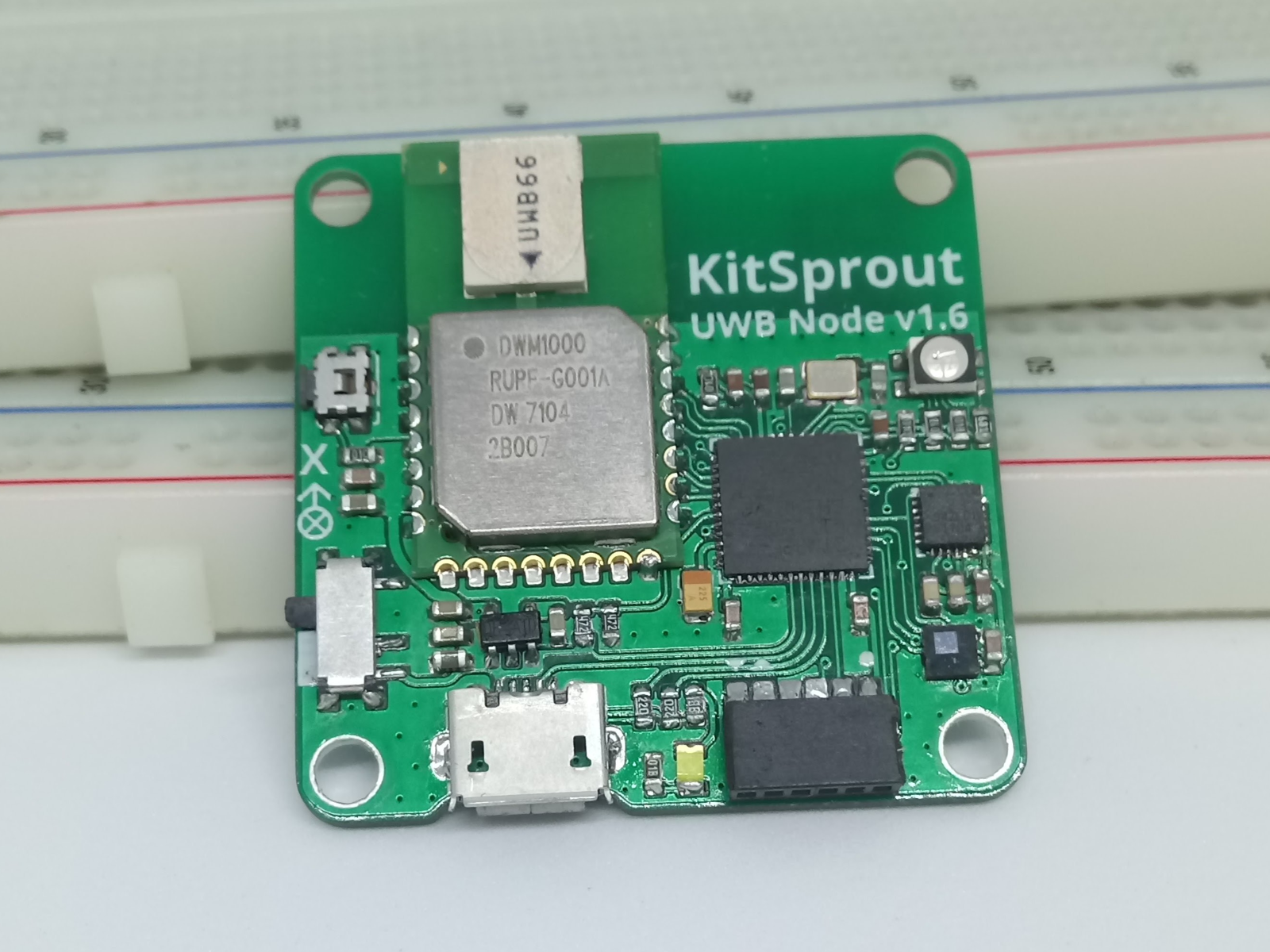
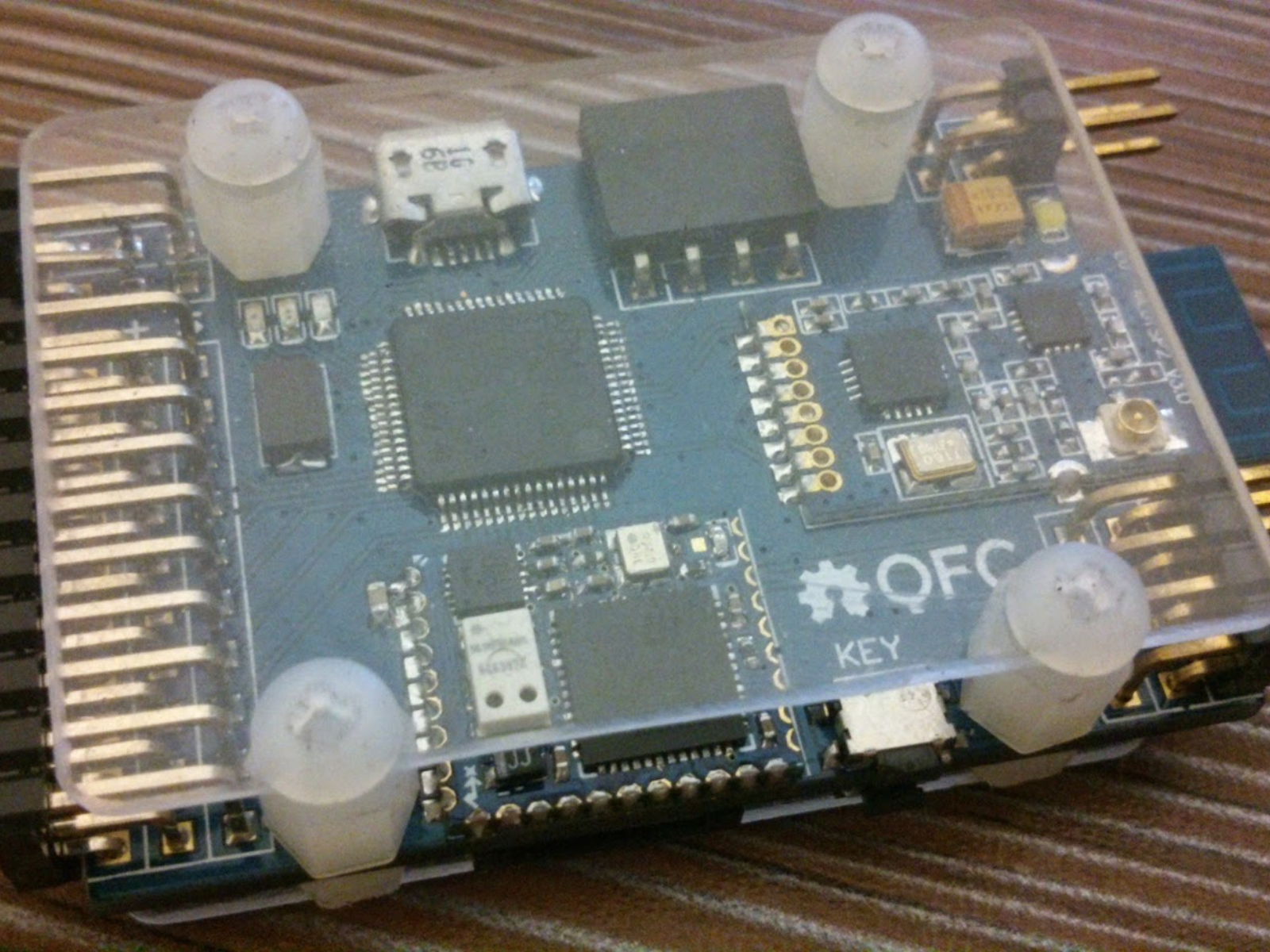
這是在完全沒有航模相關知識的情況下學習、製作,從遙控器、飛控板的製作、焊接、程式韌體的撰寫,到演算法的實現與平衡控制,控制主要使用STM32F4 系列的微控制器,最後的實作結果可以大致保持平衡。
https://github.com/Hom-Wang/Quadcopter
请先登入再留言。