- Jobs
 ResumeCreate your job-winning resume using our free resume builder.
ResumeCreate your job-winning resume using our free resume builder. PortfolioShowcase your skills and projects with a professional portfolio.ResumeCreate your job-winning resume using our free resume builder.Resume BuilderMake a resume for free.Resume TemplatesAccess our extensive library of professional & ready-to-use templates.Resume ExamplesGet inspired by real resume examples to create your own.Occupation GuideAccess resume writing guides tailored for different professions.Resume HelpGet expert advice on all things resume from our team of recruitment specialists.
PortfolioShowcase your skills and projects with a professional portfolio.ResumeCreate your job-winning resume using our free resume builder.Resume BuilderMake a resume for free.Resume TemplatesAccess our extensive library of professional & ready-to-use templates.Resume ExamplesGet inspired by real resume examples to create your own.Occupation GuideAccess resume writing guides tailored for different professions.Resume HelpGet expert advice on all things resume from our team of recruitment specialists.- ResourcesSuccess StoriesBusiness ExcellenceAbout CakeResumeFeatured Reads
- Hire
- Download our App



Car tracking and finding service in parkinglot sys

Car tracking and finding service in parkinglot sys
Data Scientist / Machine Learning Engineer
・
Taiwan Province, Taiwan
[Undergraduate Research] Car tracking and finding service in parkinglot system.
Abstract:
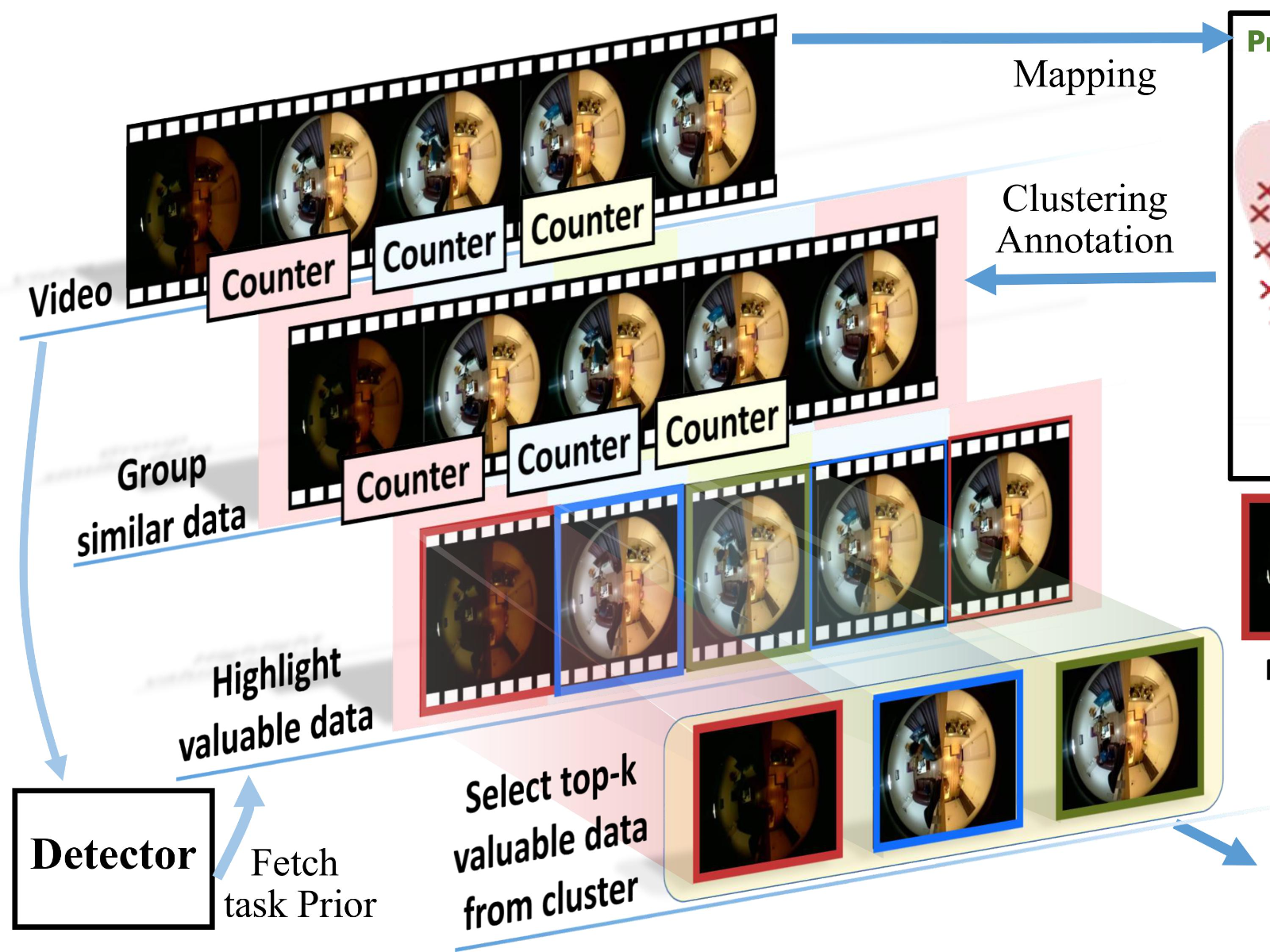
• Getting more reliable tracking results, I use image motion to enhance image-based object detection model.
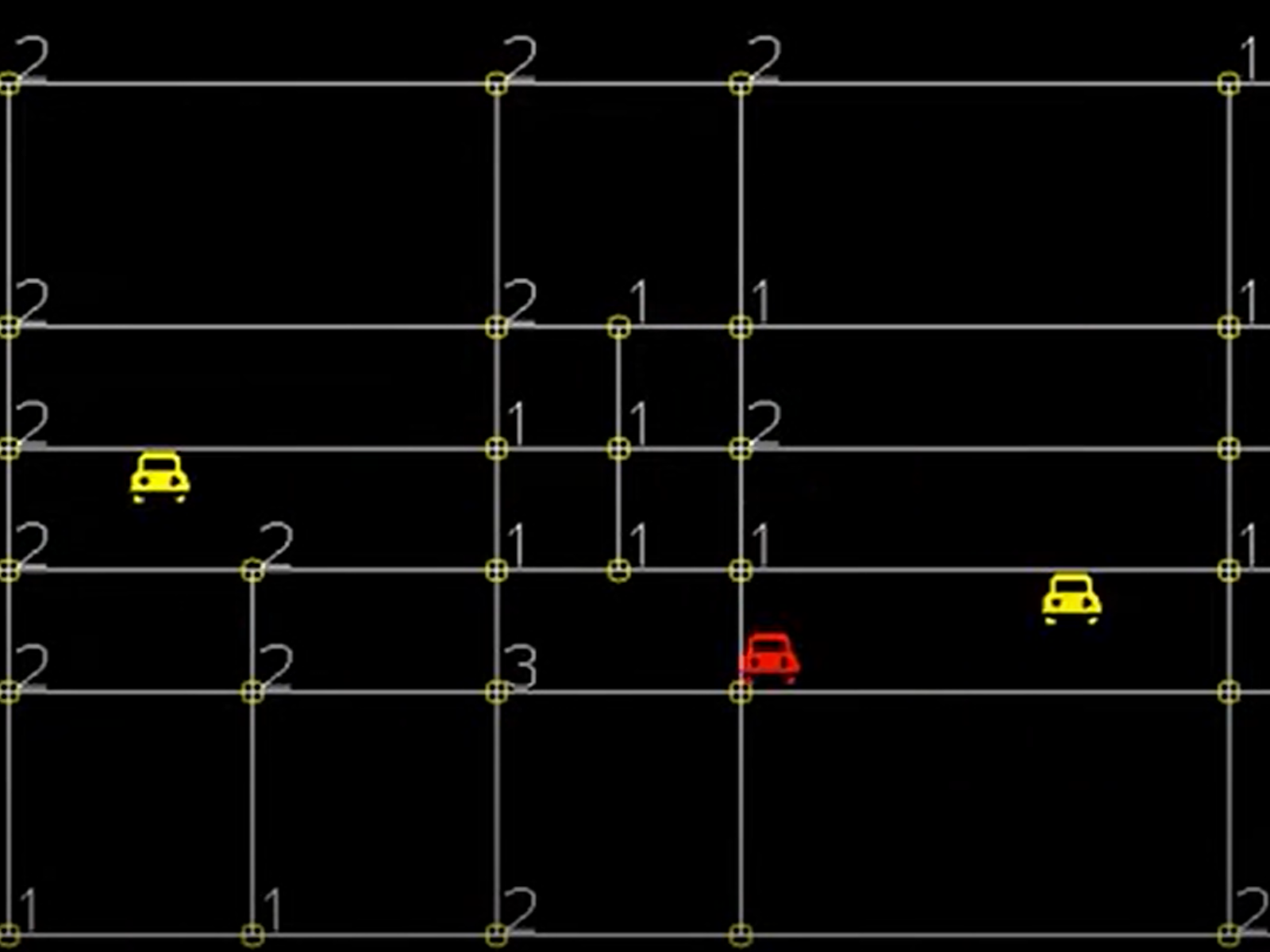
• Eliminating GPS localization error, I use trajectory information to reduce the white noise by Kalman Filter.
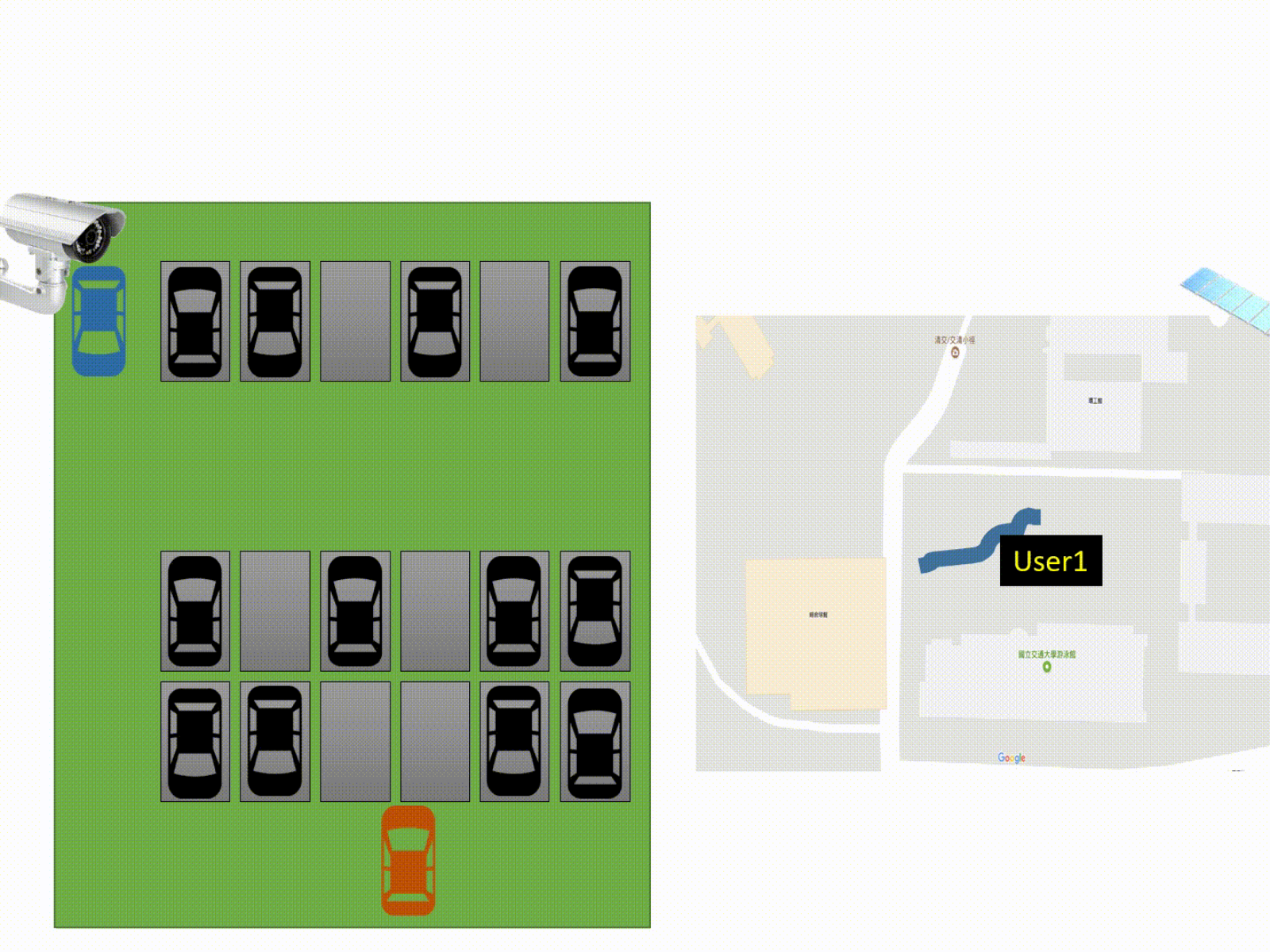
• Checking parking location for finding, I fuse GPS and image localization information by driving behavior matching.
Reference:
Document:
https://drive.google.com/file/d/0B_Idv-dGumOZUzJYcUlZT3BFdFk/view
Video:
https://www.youtube.com/watch?v=T1_LeuHiyTA&t=1s
Please login to comment.
![Cover of [Publication] Improving Human Segment by Motion .](https://media.cakeresume.com/image/upload/v1620129150/sfkmtlvweb8qxcjzm69c.png)