
- Jobs
 ResumeCreate your job-winning resume using our free resume builder.
ResumeCreate your job-winning resume using our free resume builder. PortfolioShowcase your skills and projects with a professional portfolio.ResumeCreate your job-winning resume using our free resume builder.Resume BuilderMake a resume for free.Resume TemplatesAccess our extensive library of professional & ready-to-use templates.Resume ExamplesGet inspired by real resume examples to create your own.Occupation GuideAccess resume writing guides tailored for different professions.Resume HelpGet expert advice on all things resume from our team of recruitment specialists.
PortfolioShowcase your skills and projects with a professional portfolio.ResumeCreate your job-winning resume using our free resume builder.Resume BuilderMake a resume for free.Resume TemplatesAccess our extensive library of professional & ready-to-use templates.Resume ExamplesGet inspired by real resume examples to create your own.Occupation GuideAccess resume writing guides tailored for different professions.Resume HelpGet expert advice on all things resume from our team of recruitment specialists.- ResourcesSuccess StoriesBusiness ExcellenceAbout CakeResumeFeatured Reads
- Hire
- Download our App



Pneumatically-Actuated Robot Hand

Pneumatically-Actuated Robot Hand
・
Taipei, Taiwan
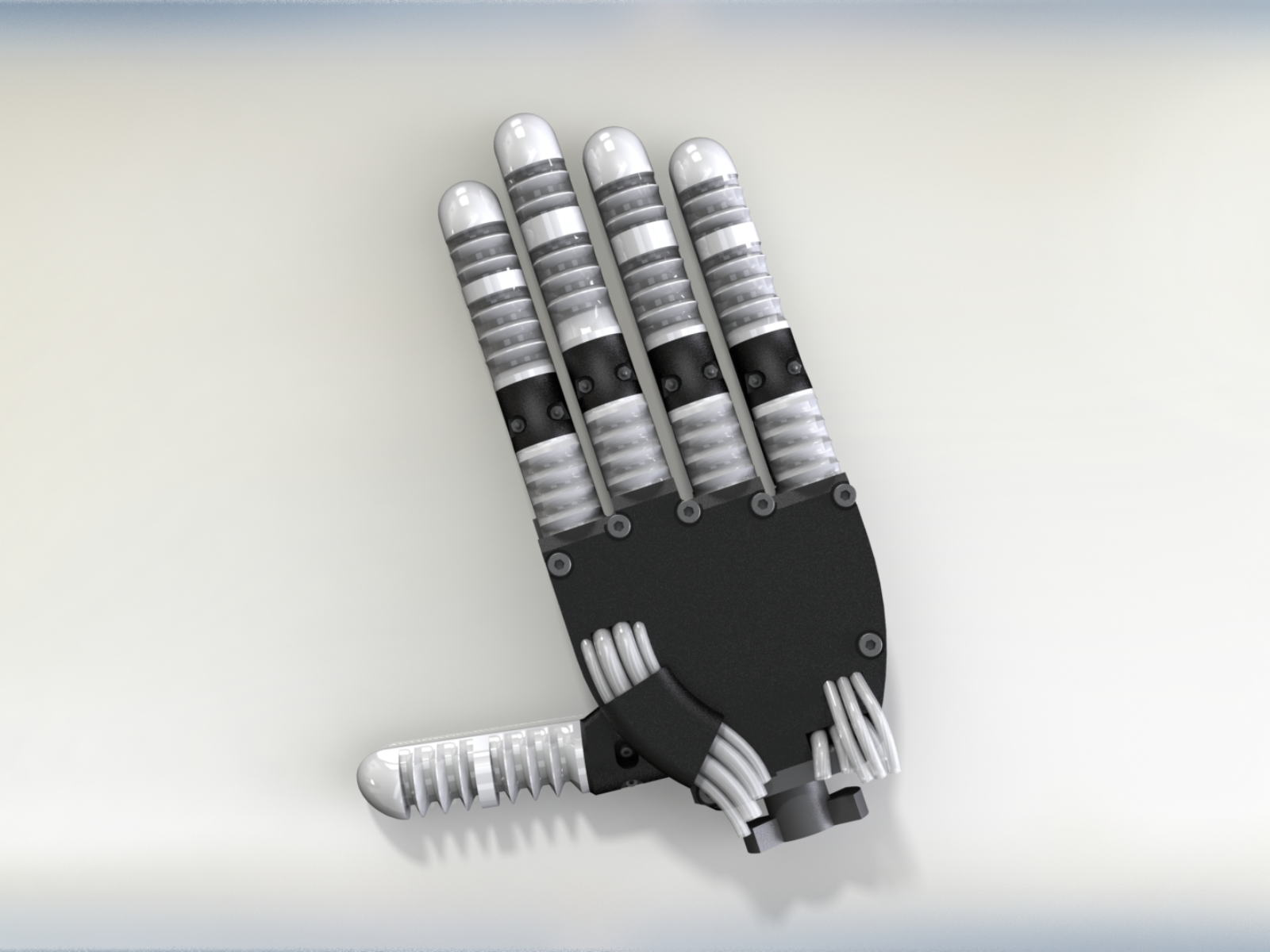
-研究與設計軟性仿真機械手,應用矽膠材質之特性研發具柔軟、可伸縮、可隨氣壓變形結構手指,具有10個自由度並且能抓取負載4.5公斤以下之不規則形狀物體。
1.領導4人團隊執行專案,定期檢視團隊成員進度與使團隊達成共識
2.使用軟體ANSYS模擬高延展材料結構受力時的延展性能與結構強度測試
3.結合試驗設計(DOE)與有限元素分析進行結構改善,在相同氣壓下改善
105%彎折效果
4.使用SolidWorks設計機械手結構,包含防氣體外洩連接、氣壓管路設計及
矽膠材料製造結構部件之3D打印模具
Please login to comment.