楊閔翔
2013年畢業於中興大學研究所之後,主要經歷皆致力於以人工智慧進行影像辨識相關之演算法開發,從最早期的descriptor + machine learning,到這幾年開始使用deep learning,工作中經歷學界和業界的轉換,因此能同時掌握最新技術,並在實務上使用並取得成果
技能
程式語言
擅長學習新的語言,對於新的語言一個月能正常使用,慣用: C/ C++,Golang 並為程式做最佳化,其他使用語言: python, android, C# 等
Tensorflow
慣用的人工智慧套件,能深入修改Network架構,並找出適合的Loss Function.使用過的Network:VGG, Resnet, DenseNet, DCGAN
Computer Vision
研究所實驗室專長: Image processing and image analysis , 3D analysis from 2D images, Machine vision, Pattern recognition
Opencv
能熟用其為DATA做前處理與後處理,更進階的亦常用其直接開發演算法
經歷
中強光電,2018 年 8 月 - 至今
1) 無人機(機隊)導航演算法開發
2) 無人車(車隊)導航排程演算法開發
中興大學,2017 年 8 月 - 2018 年 8 月
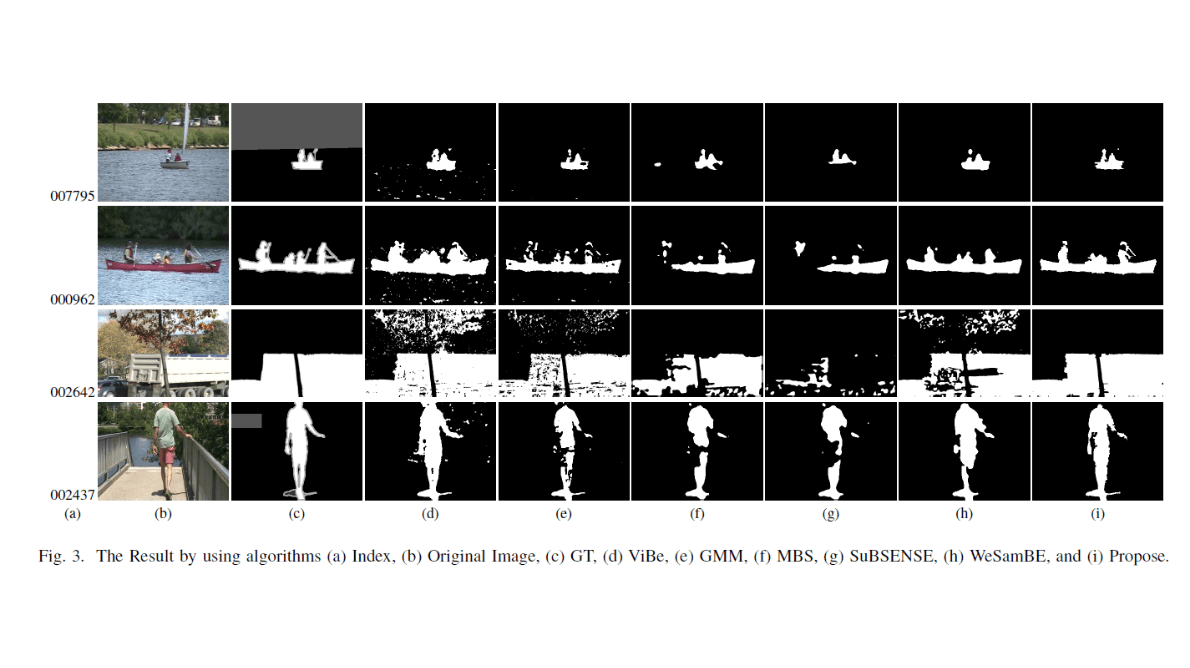
1) CSVT2014前景擷取演算法延伸,並更進一步配合人工智慧為前景做辨識
2) 使用Tensorflow實作Dense Optical flow,其主要目地可做為機器視覺的前置工作
永睿智慧科技,2016 年 8 月 - 2017 年 7 月
1) 監視系統縮時演算法,讓使用者快速瀏灠過去的記錄影像,且能配合人工智慧更精準濃縮使用者感興趣的目標
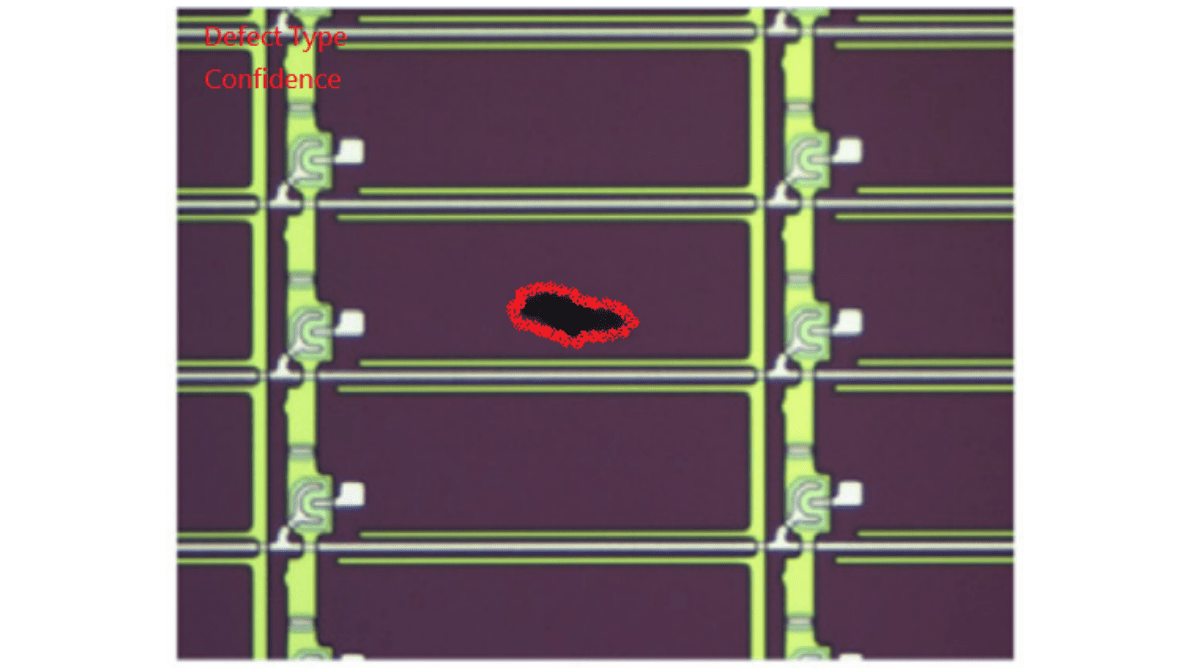
2) 非定位AOI演算法開發,主要為IC檢測,其中包
- 瑕疵區域偵測
- 瑕疵種類判斷
- 引入Deep learning技術
中強光電,2015 年 3 月 - 2016 年 8 月
以人工智慧(機器視覺)為四軸飛行機做細部的任務導引,其間完成:
- optical flow : 使用在室內飛行時的懸停或特殊航線
- precision landing : 使四軸能精準降回基地
- object tracking : 特殊飛行任務情況下,能有效追蹤目標物
方象國際,2014 年 7 月 - 2014 年 12 月
與新北市警局合作導入監視系統,以實現智慧辦案,其間以
- 將前景物件特徵化,並儲入資料庫系統
- 跟據可疑人或物的特徵,用資料庫系統快速比對
成功大學,2013 年 7 月 - 2014 年 7 月
1) CSVT2014 前景擷取演算法開發
2) 在地型科專計畫,主要解決異質性資料庫架接問題
3) 以人工智慧分析路口監視器之流量與異常事件
Tensorflow
用Tensorflow實作FlowNet,其中Network選用Resnet並改成pixel-wise
基本上就是需對每個pixel判斷其在第一張圖到第二張圖的"位移量",目前結果平均誤差值約10個pixels

非定位AOI
左上文字: defect code
左上數字: 信心度
紅圈: 為defect所在位子
前期以SVM為主,後期開始導入Deep Learning
註:因有保密條約,不能使用原工作圖,右圖為網路上的擷取相似圖
前景偵測
CSVT2014的延伸,原預計投TIP2018,但因時間因素,現只完成演算法及實驗結果,基本上已符合監視系統所要求的時間與精準度標準