LIU, YU-TING
Once served as a summer intern in the Industrial Technology Research Institute, and also have two industry-university cooperation project experiences, and have practical experience in AI applications and ROS systems. The current thesis is the indoor and outdoor positioning system of GPS, Wifi and geomagnetism. In January 2021, I am expected to go to Norway as an exchange student to cultivate international team communication skills.
National Chiao Tung University | Institute of Intelligent Systems
AI engineer、 software engineer
Taichung,TW ,No. 40-6, Yongchun E. 2nd Rd., Nantun Dist.
+886 0972932761
[email protected]
Skills
Programming language : Python 、C++、Verilog
AI design tool : Tensorflow 、 Pytorch
UI design tool : QT Creator 、 C#
Robot system : ROS
Virtual machine : Docker
Virsion control : Github
Educational background
NCTU, Master degree, Institute of Intelligent Systems, 2019 ~ 2021
The teaching content of the college emphasizes practical ability, and the courses mainly use practical results to score students.
NCU, Bachelor degree , Electrical Engineering , 2015 ~ 2019
Learn the basic knowledge of crystal circuit design, and find the enthusiasm for programming.

Work experience
ITRI, Smart Front End Innovation Service Department, summer intern, 2019 年 7 月 - 2019 年 8 月
- Test Han Lai company's warehouse robot and developed a set of UI interface with C#.
- Analyze the ROS navigation code and find out how to import the newly developed positioning algorithm into the original system.
- Have the ability of independent development, active analysis and problem solving.

Topic and Project Experience
Junior Independent Study
Intelligent seat belt warning system
Design an APP program that combines magnetic induction and wifi technology, and make an external small sensor device attached to the seat belt, so that the car driver can use this intelligent seat belt warning device system to control the safety of the passengers at any time.
Senior Industry-University Cooperation Project
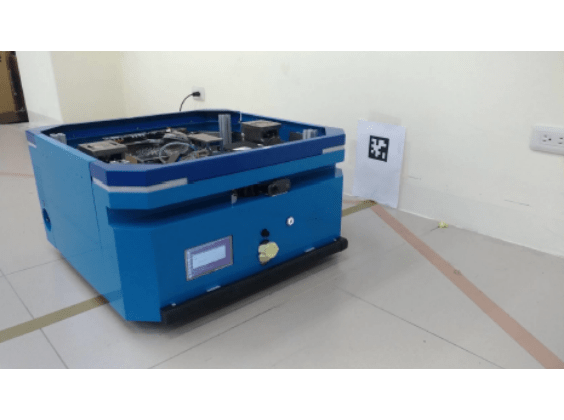
Automated guided vehicle near-end positioning system
Set up remote control through MODBUS communication protocol and ssh network transmission protocol, rewrite the register data of two servo motors, and manipulate the AGV. Using opencv and apriltag technology, the AGV can know the x, y, and the target position through the image. The z-coordinate offset and the quaternion are transferred between programs via ROS, and the Euler angle is calculated according to the conversion of the obtained quaternion, so as to know the angle with the vertical plane of the tag for near-end path planning.
Master Independent Study
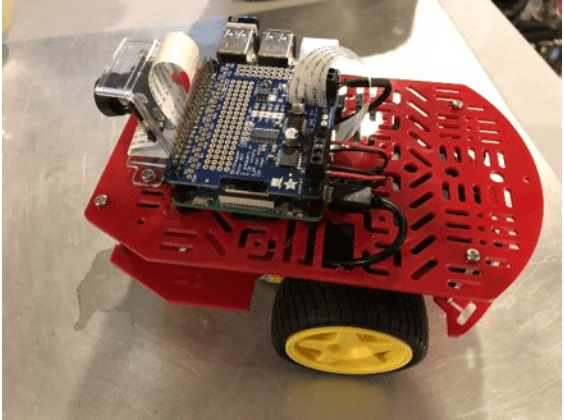
Unmanned Overtaking System
At present, most of the driverless systems we see on the market can only follow cars and single-lane automatic driving, and cannot change lanes or even overtake. Therefore, we use ROS robots to try to simulate the overtaking situation of self-driving cars. We train decision tree parameters through genetic algorithm, so that the self-driving car can use the ultrasonic sensor to judge the overtaking time by itself without external control, so as to complete the flexibility of automatic driving.

Master Independent Study
Collision warning system
From some research on the "active safety protection system", we found that this system has considerable results in preventing accidents. However, the current vehicles on the road are mostly old cars that do not have this system installed. Therefore, we design an APP Use Tensorflow lite to perform vehicle identification and distance estimation on mobile phones, and give drivers voice reminders at appropriate times, in order to improve the driving safety of old cars.
Master Industry-University Cooperation Project
UAV swarm automatic tracking system
Through the UAV image, the UAV swarm can detect all the people appearing in a field, and the UAV swarm can share the identification results, so that different UAVs can see the same person and give the same ID, and when necessary, let the drone group track the moving path of the target person. The development content involves Re-ID within a single camera and Re-ID between multiple cameras, and is still under continuous development.


Language ability
English
Listening: Proficient | Speaking: Proficient | Reading: Proficient | Writing: Proficient
TOEIC 885
Autobiololgy
I am Liu, Yu-Ting, and I grew up in a warm family of four. My parents gave me enough support and freedom during my growing up and studying, shaped my independent and responsible personality, and allowed me to develop toward my interests and goals. I became interested in the application of software and language programming at the university, and the continuous exploration of interest led me to study at the Intelligent System and Application Institute of AI College of Jiaotong University.
【Education experience】
During my studies, what brought me the most growth was the experience of topic and industry-university cooperation projects.
Before I studied the graduation topic "Intelligent Seat Belt Warning System", I was very new to arduino and app design, but thinking that this is an interesting topic, I started to find information from the Internet to learn, in each stage of development , Seeing that the system operates as we expected gave me a full sense of accomplishment. After finding the interest to invest in it, I completed the topic and was affirmed by the excellent work of Wanrun 2018 Innovation and Creativity Competition.
The industry-university cooperation project of the senior gave me access to the linux system, python language and ROS operating system. With the previous experience in the topic, I can learn online and discuss with classmates if I don’t understand it. It only takes half a year to complete " Automated guided vehicle near-end positioning system ".
The above experience made me no longer afraid to get in touch with new knowledge, so I started to take AI-related courses offered by the Institute of Information Technology, the Institute of Electrical Engineering, and Institute of Communication in the fourth year. Most of these courses require the payment of programming tasks, which also improved my practice. Ability.
Study for Master degree, I came to AI academy. The academy emphasizes practical ability, and has to submit a independent study every semester, and with no restriction to the topic. It allows me to do whatever I want to try. I tried to use genetic algorithms to train decision tree parameters for the independent study of the first semester when I am master of first grade, "Unmanned Overtaking System", and successfully made our ROS robot achieve the desired action in the environment we set. The next semester's independent study "Collision Warning System" is to try to use tensorflow lite to allow the mobile phone to run neural network operations, and finally actually drive on the road to verify the feasibility of our study.
The development of the "UAV swarm automatic tracking system" is a relatively innovative idea, so during the research process, I also cultivated my ability to read a lot of papers, find methods and integrate different paper programs.
【Interests】
In my spare time, I often go out of school and play badminton with my golf friends. I also often go outdoors with my friends during holidays. Try not to let myself stay at home for a long time and keep in touch with others. This keeps my mind and body at their best. The state of being able to face and handle any affairs with an optimistic and positive attitude.
【Growth experience】
During my studies, I cultivated the ability to learn independently, as well as the ability to communicate in teamwork and discussion. I think this is the key to maintaining competitiveness in the technological industry where technology is constantly advancing. Self-help learning allows me to constantly update my knowledge, and the cooperation and communication with others keeps my ideas from being limited. I have always been able to complete various studies and projects with the support of partners, and the teachers who continue to advise me to prevent me from getting lost in the process of growing up.
【Future wish】
At present, the mainstream AI application is still in image processing, but in fact, some AI applications have recently been seen to accelerate the simulation speed or adjust the traditional PID parameters. These make me think that AI still has a lot of places that can come in handy. No one goes to research, therefore, in the future, I hope to continue to strengthen my capabilities, develop more AI-related applications, and bring more innovation to the company.
The research direction of my thesis is an indoor and outdoor positioning system that combines GNSS, Wifi and geomagnetism. The goal is to judge the user's movement near the building door only through the information received in the user's mobile phone.
My idea is to input the GNSS signal, the Wifi signal and the geomagnetic signal into three different AutoEncoders to get the Latent Code of the same dimension, then combine the three Latent Codes and input them into the LSTM, and locates the user’s current location every five seconds. The collection of training data is to combine the concept of fingerprint positioning. Several grids are defined near the entrance of the building. In each grid, GNSS, Wifi and geomagnetic signals are collected for a period of time. After training, the entire system needs to solve the grid ID where the user is located.
For the GNSS part, I do not simply use the latitude and longitude given by the positioning system as location judgment information, but use GNSS raw data to calculate the pseudorange, ECEF, and lla coordinates of each satellite. For the Wifi part, I add noise to the RSSI value, and use the normalized value as the input of the neural network. The geomagnetism uses the three-dimensional Tesla intensity received by the mobile phone, take data that has done coordinate-corrected information with gravitational acceleration as input.
The current progress is that I can use the GNSS raw data to figure out the pseudorange and use the satellite time stamp to enter the nasa ftp to download the ephemeris information closest to the current time. Through the ephemeris information, I can figure out the satellite’s current lla coordinates, wifi and the geomagnetic signal has also been pre-processed. The processed data is sent to three AutoEncoder + Fully connect layer models I designed for multi-task learning. After the latent code output by the encoder, it is reduced by pca through tsne, it is already possible to see that the data received at each location is effectively converging. The next stage will be a lstm positioning study combining three signals.
