劉昱廷
曾經在工研院擔任暑期實習生,也有兩項產學合作專案經歷,對AI應用及ROS系統有實戰經驗。目前論文方向是GPS、Wifi與地磁協作的室內外定位系統。在2021年1月預計前往挪威當交換學生,培養國際團隊溝通能力。
國立交通大學 | AI學院智慧系統與應用所 碩士 在學中
AI工程師 、 軟體工程師
Taichung,TW ,台中市南屯區永春東二路40-6號
+886 0972932761
[email protected]
技能
程式語言 : Python 、C++、Verilog
AI網路開發 : Tensorflow 、 Pytorch
介面開發 : QT Creator 、 C#
機器人協作 : ROS
伺服器虛擬機架設 : Docker
版本控制 : Github
學歷
國立交通大學, 碩士學位, AI學院 智慧系統與應用所, 2019 ~ 2021
學院教學內容強調實作能力,課程主要透過實作成果給學生評分
國立中央大學, 學士學位, 電機工程學系, 2015 ~ 2019
學習電晶電路設計基本知識,大三專題找到對於程式撰寫的熱忱

工作經歷
工研院 智慧前端創新服務部,暑期實習生,2019 年 7 月 - 2019 年 8 月
- 測試漢錸來公司倉儲機器人並用C#開發一套UI介面
- 解析ROS導航程式碼並從中找出將新開發定位演算法導入原系統的方法
- 具備獨立開發、主動分析、解決問題的能力。

專題與專案經歷
大三專題
智慧型安全帶警示系統
設計結合磁感與wifi技術之APP程式,並製作成一個繫於安全帶上之外部小型感應裝置,方便汽車駕駛人透過運用這套智慧型安全帶警示裝置系統,隨時掌控車上乘客有無繫上安全帶的情況。.
大四產學專案
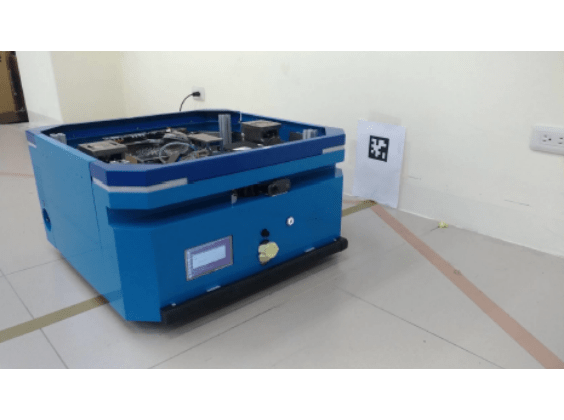
自走車近端定位系統
透過MODBUS通訊協定與ssh網路傳輸協議,架設遠端控制,改寫兩個伺服馬達的寄存器數據,對AGV進行操縱,運用opencv與apriltag技術,使AGV透過影像得知與目標位置的x,y,z座標偏移量與四元數,經由ROS在各程式間傳輸數據,依所得四元數的轉換計算尤拉角,藉此得知與tag垂直平面的夾角,以進行近端的路徑規劃。
碩一專題
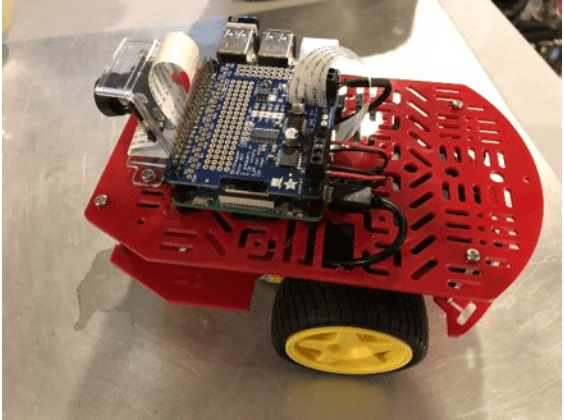
無人超車系統
目前市面上我們看到的無人駕駛系統大多只能做到跟車與單線道自動駕駛,無法變換車道甚至是超車,因此我們藉由ROS機器人,嘗試模擬自駕車的超車情形,透過基因演算法訓練決策樹參數,讓自駕車不透過外部控制,即可藉由超音波感測器,自行判斷超車時機,以完整自動駕駛的靈活度。

碩一專題
碰撞警示系統
從一些對於「主動安全防護系統」的研究我們發現這套系統對於防止事故發生有相當的成果,但目前於道路上行駛的車輛還是沒有安裝這套系統的舊車居多,因此,我們設計一個APP透過Tensorflow lite在手機上進行車輛辨識與距離估算,在適當時機給予駕駛語音提醒,想要提升舊車駕駛的行車安全。.
碩一產學專案
無人機群自動追蹤系統
透過無人機影像讓無人機群可以在一個場域內偵測到所有出現的人物,並且讓無人機群共享辨識結果,使不同無人機看到同一個人物能給予相同的ID,並在必要時讓無人機群可以追蹤目標人物移動路徑,開發內容涉及單攝影機內的Re-ID與多攝影機間的Re-ID,目前仍在持續開發中。


語文能力
英文
聽:精通 |說:精通|讀:精通|寫:精通
TOEIC 885分
自傳
我是劉昱廷,生長在一家四口的溫馨家庭,父母在我成長求學的過程中扮給我足夠的支持與自由,塑造我獨立、負責的個性,並讓我朝著興趣及目標發展。在大學對軟體的應用及語言程式撰寫產生興趣,向著興趣不斷探索讓我來到交通大學AI學院智慧系統與應用所就讀。
【學歷經歷】
在學期間,帶給我最多成長的是專題與產學專案的經歷。
我在研究畢業專題『智慧型安全帶警示系統』前,對於arduino、app設計都很陌生,但想著這是一個有趣的題目,便開始從網路找資料學習,在每一階段的開發中,看見系統如我們預想的運作,便帶給我十足的成就感,找到興趣投入其中後,便完成了專題,還得到了萬潤2018創新創意競賽佳作的肯定。
大四幫忙專題指導教授的產學的專案讓我開始接觸linux系統、python語言與ROS作業系統,有了之前專題的經驗,我有不懂就上網學習、和同學討論,僅用半年就完成『自走車的近端定位系統』。
以上經歷讓我不再畏懼去接觸新知識,於是大四下我就開始修習資工所、電機所以及通訊所開設的AI相關課程,這些課程大都要求程式作業繳交,也提升了我的實作能力。
研究所來到AI學院,學院強調實作能力,每學期都要繳交專題,題目方向不定。這也讓我得以想嘗試什麼就去做。 碩一上學期的專題『無人超車系統』我嘗試用基因演算法去訓練決策樹參數,成功讓我們的ROS機器人在我們設定的環境內達成我們預想的動作。而下學期的專題『碰撞警示系統』則是嘗試使用tensorflow lite讓手機端可以運行神經網路運算,最後也實際開車上路驗證了我們專題的可行性。
而目前我正在執行的『無人機群自動追蹤系統』開發,由於是比較創新的發想,因此研究過程中也培養我大量閱讀論文,從中尋找方法並整合不同論文程式的能力。
【興趣】
課餘閒暇時,我經常到校外和球友切磋羽毛球,假日也經常和朋友到室外走走,盡量不讓自己長時間待在家裡,並且多與人接觸,這使我的身心隨時保持在最好的狀態,能夠以樂觀積極的態度面對及處理任何事務。
【成長心得】
在學期間的經驗,我培養出自主學習的能力,以及團隊合作及討論的溝通能力。我認為這是在技術不斷進步的科技業內維持競爭力的關鍵,自助學習讓我不斷更新知識,而與他人的合作溝通讓我的想法不會被侷限。一直以來我能夠完成各項專題與計畫都是有夥伴的支持,以及不斷給我建議的師長們才避免我在成長的過程中迷航。
【未來期許】
目前主流AI的應用還是在於影像處理,不過其實近期也有看到一些AI應用在加快模擬速度或是調整傳統PID參數的研究,這些讓我覺得AI還有很多可以派上用場的地方,只是還沒有人去研究,因此,未來我希望能持續加強自己的能力,開發出更多AI相關的應用,帶給公司更多的創新。
論文研究方向
我的論文研究方向是結合GNSS、Wifi與地磁的室內外定位系統,目標是想僅透過使用者手機內收到的資訊,判斷使用者在大樓門口附近的移動動線。
我的想法是將GNSS訊號、Wifi訊號以及地磁訊號輸入到三個不同的AutoEncoder得出相同維度的Latent Code,之後將三個Latent Code結合並輸入至LSTM,每隔五秒鐘就透過這五秒內收集到的資訊定位出使用者目前所在位置。而訓練資料的蒐集則是想要結合fingerprint定位的概念,在大樓門口附近先定義出數個網格,在每個網格內都去蒐集一段時間的GNSS、Wifi與地磁訊號,訓練後整套系統要解出的便是使用者所在的網格ID。
GNSS的部分我不是單純透過定位系統給出的經緯度當作位置判斷資訊,而是透過 GNSS raw data 去計算每個衛星的偽距以及ECEF、lla座標。Wifi部份我是對RSSI數值添加噪音,並將其正規畫後的數值當作神經網路的輸入。地磁則透過手機收到的三維特斯拉強度,結合重力加速度做座標校正後的資訊作為輸入。
目前進度是我已經可以藉由GNSS raw data 解出偽距並且透過衛星時間戳記進到nasa ftp下載最接近當下時間的星曆資訊,透過星曆資訊可以解出衛星當下所在的lla座標,wifi及地磁訊號也已經完成前處理,經過處理後的資料送入三個我自行設計的AutoEncoder + Fully connect layer模型進行多任務學習後,透過tsne對encoder輸出的latent code進行pca降維處理後,已經可以初步看出在各個位置點收到的data正在有效的收斂中,下一階段將會進行結合三種訊號的lstm定位研究。
