邱建緯
Vincent Chiu
軟韌體工程師/系統工程師
喜歡與人溝通及合作,擅長表達及聽取他人意見,樂於學習嘗試新的人事物,造就自己遇到挫敗,能及時修正並精進自己的能力。
目前為交大電控所碩三的學生,在宋開泰教授的指導下,主要研究基於語意地圖資訊之移動手臂車抓取控制設計,旨在透過AI使機器人能了解環境中的地標及物體,使移動手臂車能前往特定地點抓取特定物品。
參與許多計畫及競賽的經驗,磨練了如何在不同開發平台整合並解決問題的能力,擔任計畫負責人也增進專案排程與團隊合作及溝通的能力。
碩士生 Hsinchu, TW Email: [email protected] Tel: +886 972231127
技能
程式語言
- C/C++/C#
- Python/Java
- MATLAB
- HTML
開發工具
- ROS
- Linux
- Embedded System
- SolidWorks
- OpenCV、PCL
擅長領域
- 系統整合
- 嵌入式作業系統
- 機器視覺
- 機器人控制演算法
語言能力
- 中文
- 英文:GEPT中高級初試
學歷
國立交通大學
電控工程研究所
July 2019 - 至今
- 宋開泰教授<智慧型系統控制整合實驗室-ISCI Lab>
- 論文題目:基於語意地圖資訊之移動手臂車抓取控制設計與實現(AI/C++/Python/Docker)
- 修習課程:嵌入式作業系統、感測與智慧系統、自主駕駛車技術、車輛視覺系統、資料科學、影像處理、數位訊號處理、生醫設計與實作
國立交通大學
電機工程學系
Sep 2015 - Jun 2019
- 修習課程:
- 程式相關:物件導向程式設計、進階物件導向程式設計、JAVA程式設計
- 控制及韌體相關:自走式機器人、自動控制系統、數位訊號處理導論、硬體創意專題
- 其他專業科目:電力電子實驗、電腦網路導論、數據通訊、物聯網前瞻產業分析
參與計畫案及工作經歷
人機協作機器人之路徑規劃與互動控制系統開發
中華民國科技部、達明機器人 • July 2021 - 至今
本計畫之主要目標在為AMR研發一套人機協作路徑規劃與導航系統,提升AMR之協作彈性與智慧應用。計畫內容包含協作型機械臂全方位避碰路徑規劃模組、協作型AMR人機互動路徑規劃與自適應自主導航模組。計畫第一年成果主要為驗證我的論文內容,能夠落地展示移動機械臂穩定地完成移動抓取,並整合前期智慧無人搬運車計畫人員辨識及運動規劃的研究成果。
智慧無人搬運車系統研發
新代科技股份有限公司 • July 2019 - July 2021
計畫第二年主要開發多機器人雲端路徑規劃及人機協作系統,整合人員識別於智慧無人搬運車系統,使機器人能在環境中閃避人員並與特定人員進行協作,研究成果也發表至IEEE,並擔任主要作者。
計畫第三年著重智慧無人搬運車控制系統整合,建置多機器人雲端排程和智能管理系統,並整合機械臂進行智慧取放,完成現代自動化工廠需求的情境。擔任計畫負責人,也磨練專案排程與團隊合作及如何和學弟、廠商、溝通的能力。
基於 ROS 架構之 3D 環境感知及工件姿態估測模組開發
中華民國科技部、達明機器人 • July 2020 - Jun 2021
本計畫研發一套3D視覺模組,應用於協作型機械臂之即時避碰與安全取放。提出Virtual torque的設計使機械臂終端工具得以旋轉來調整姿態,更靈活閃避碰撞並使閃避動作更為平順,縮短避碰路徑。針對移動式機械臂開發出一套混合相機系統之手眼校正演算法,快速並同時完成Eye-in-hand及Eye-to-hand兩種相機系統之手眼校正,主要負責架設手臂車體部分的定位及導航控制系統,以達到準確靠站完成手眼校正。
ROS-based 機器人創新應用提案競賽
經濟部工業局 • July 2020 - Sep 2020
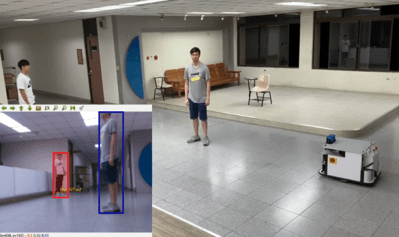
本提案開發具備櫃位查詢與帶位導航功能之賣場服務機器人,開發一種人機互動控制演算法,其可以針對機器人後方消費者的行為狀況來調整機器人的運動行為,於其後方外加互動影像硬體模組,以便執行人臉偵測確保在帶位過程中,顧客有跟上機器人,並且在桃園特例家居落地服務顧客,透過顧客的反饋修改機器人,以便能進行更完善的服務。
新代科技暑期智慧製造研習營(實習生)
新代科技股份有限公司 • Jun 2019 - Aug 2019
學習在自動化產業中應用控制器的深入知識,例如CNC加工機背後的MACRO語法及PLC Ladder組成,到使用者端的介面,再到機器人間的通訊方式,及雲端資訊的整合。並且最後以組別的方式完成了一套工業4.0的生產流程,從客製化接單透過機械臂夾取工件雷射打標到完成訂單。學習到了如何與夥伴分工合作,透過團隊合作順利達成目標。
智慧機器人實驗助教
國立陽明交通大學 • Sep 2019 - Jun 2021
負責教受及幫助學生完成 Lego Mindstorms、 LabVIEW Robotics、KNR robot controller、Matlab Simulink Robotics, Kuka 6- DOF 關節型機械臂等實驗,並獲得老師提名為優良教學助理。
國高中家教及家教班老師
Feb 2016 - Jan 2022
從小就熱心教學樂於幫助同學成長,在家教的過程中,認真負責的對待每次教學,不僅從教學中得到正向的回饋增進了表達能力並且更富耐心,自己編寫講義也培養了對一個事物的看法及組織能力。
學術發表
Autonomous Docking in a Human-Robot Collaborative Environment of Automated Guided Vehicles
2020 International Automatic Control Conference (CACS)
基於語意地圖資訊之移動手臂車抓取控制設計與實現
碩士班論文(暫定)
作品


行動輔具的內部安全性
採用Yolo v2 來辨識腳,由手把的輸入轉換成力的大小與力矩以判斷用力程度與轉彎的方向,引入Tandem stance概念,當支撐腳與轉彎方向反邊時,才允許轉彎。
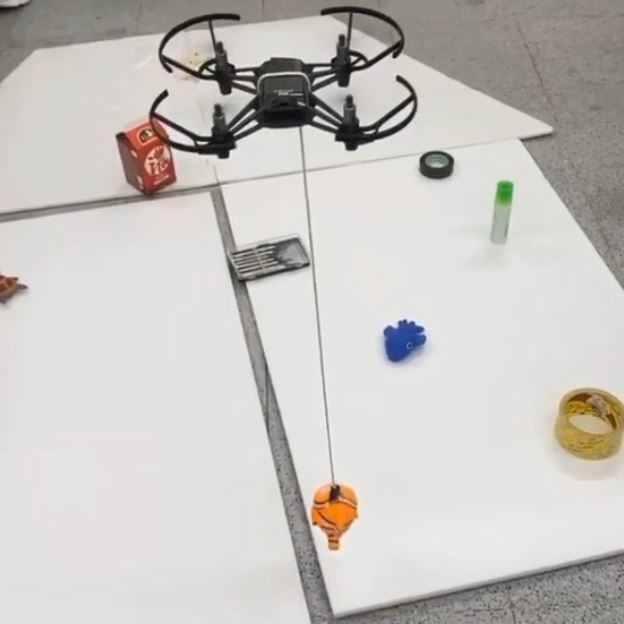
機器視覺專題-Fishing Drone
將四軸飛行器結合機器視覺,透過MobileNetSSD深度學習模型,辨識出抓取目標,並藉由目標位置控制飛行器升降進行抓取。

感測與智慧系統專題競賽
競賽整合物件影像辨識、機械手臂抓取與姿態估測、機器人定位與導航。運用ROS框架內的資料溝通,以順利地將機器人完成競賽目標。
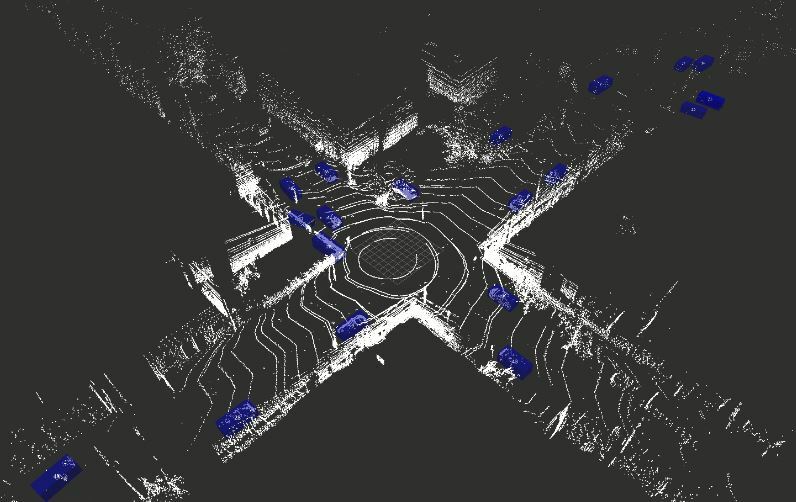


智慧帶位與櫃位查詢機器人
使用3D Lidar SLAM在環境中建立地圖,利用Android Studio撰寫櫃位介紹及帶位APP供顧客使用,並利用嵌入式開發模組Raspberry Pi 4 進行人臉辨識,並透過Socket與機器人溝通,以達到智慧帶位功效。