- Jobs
 ResumeCreate your job-winning resume using our free resume builder.
ResumeCreate your job-winning resume using our free resume builder. PortfolioShowcase your skills and projects with a professional portfolio.ResumeCreate your job-winning resume using our free resume builder.Resume BuilderMake a resume for free.Resume TemplatesAccess our extensive library of professional & ready-to-use templates.Resume ExamplesGet inspired by real resume examples to create your own.Occupation GuideAccess resume writing guides tailored for different professions.Resume HelpGet expert advice on all things resume from our team of recruitment specialists.
PortfolioShowcase your skills and projects with a professional portfolio.ResumeCreate your job-winning resume using our free resume builder.Resume BuilderMake a resume for free.Resume TemplatesAccess our extensive library of professional & ready-to-use templates.Resume ExamplesGet inspired by real resume examples to create your own.Occupation GuideAccess resume writing guides tailored for different professions.Resume HelpGet expert advice on all things resume from our team of recruitment specialists.- ResourcesSuccess StoriesBusiness ExcellenceAbout CakeResumeFeatured Reads
- Hire
- Download our App



Design of Sensor Fusion Driver Assistance System f

Design of Sensor Fusion Driver Assistance System f
Senior Software Engineer
・
Sunnyvale, CA, USA
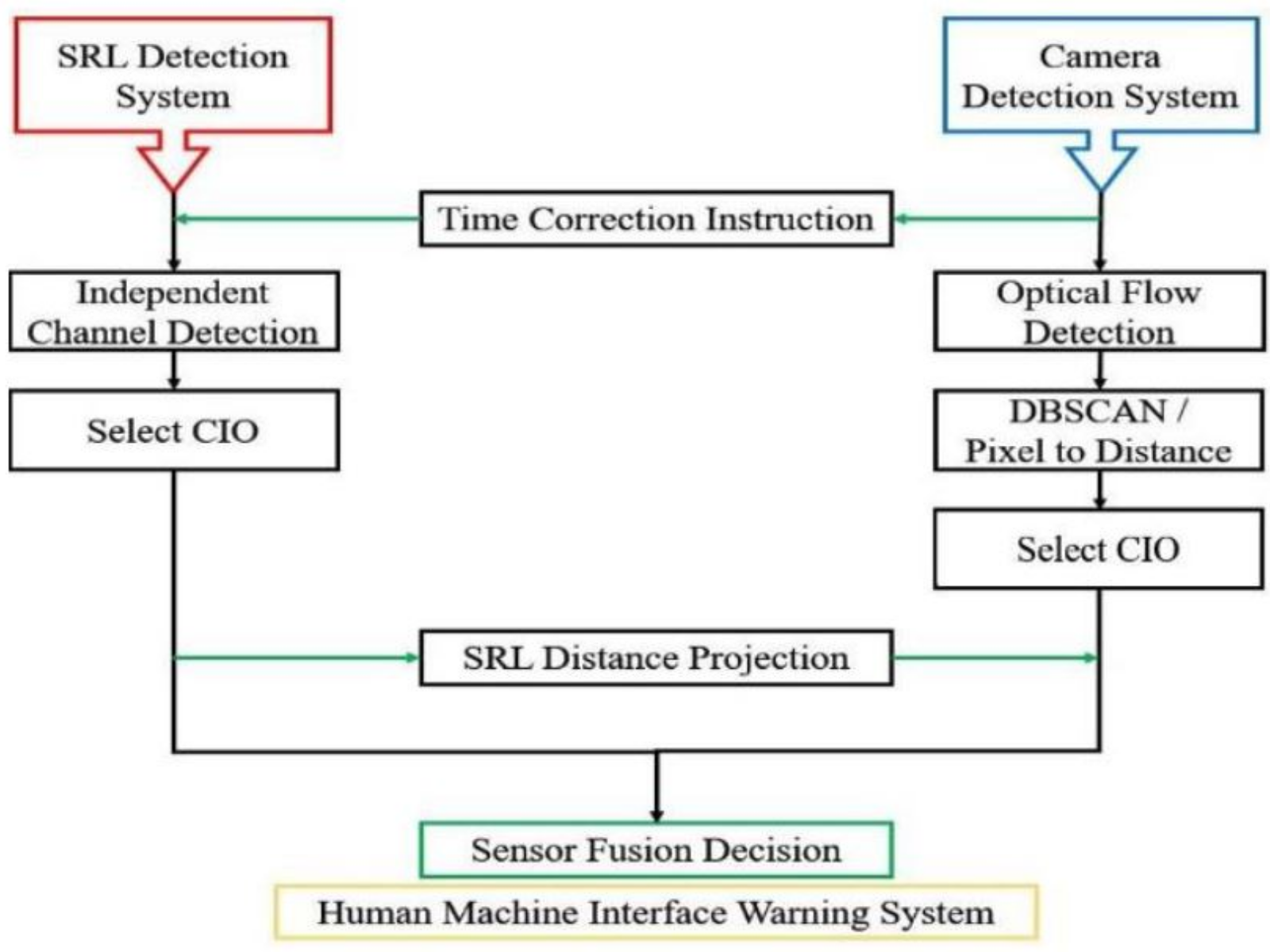
In this paper, we present a parallel architecture for a sensor fusion detection system that combines a camera and 1D light detection and ranging (lidar) sensor for object detection. The system contains two object detection methods, one based on an optical flow, and the other using lidar. The two sensors can effectively complement the defects of the other. The accurate longitudinal accuracy of the object’s location and its lateral movement information can be achieved simultaneously. Using a spatio-temporal alignment and a policy of sensor fusion, we completed the development of a fusion detection system with high reliability at distances of up to 20 m. Test results show that the proposed system achieves a high level of accuracy for pedestrian or object detection in front of a vehicle, and has high robustness to special environments.
Please login to comment.