Continuous Control of Robotic Arms
Continuous Control of Robotic Arms
Data Analyst
・
Taipei, Taiwan
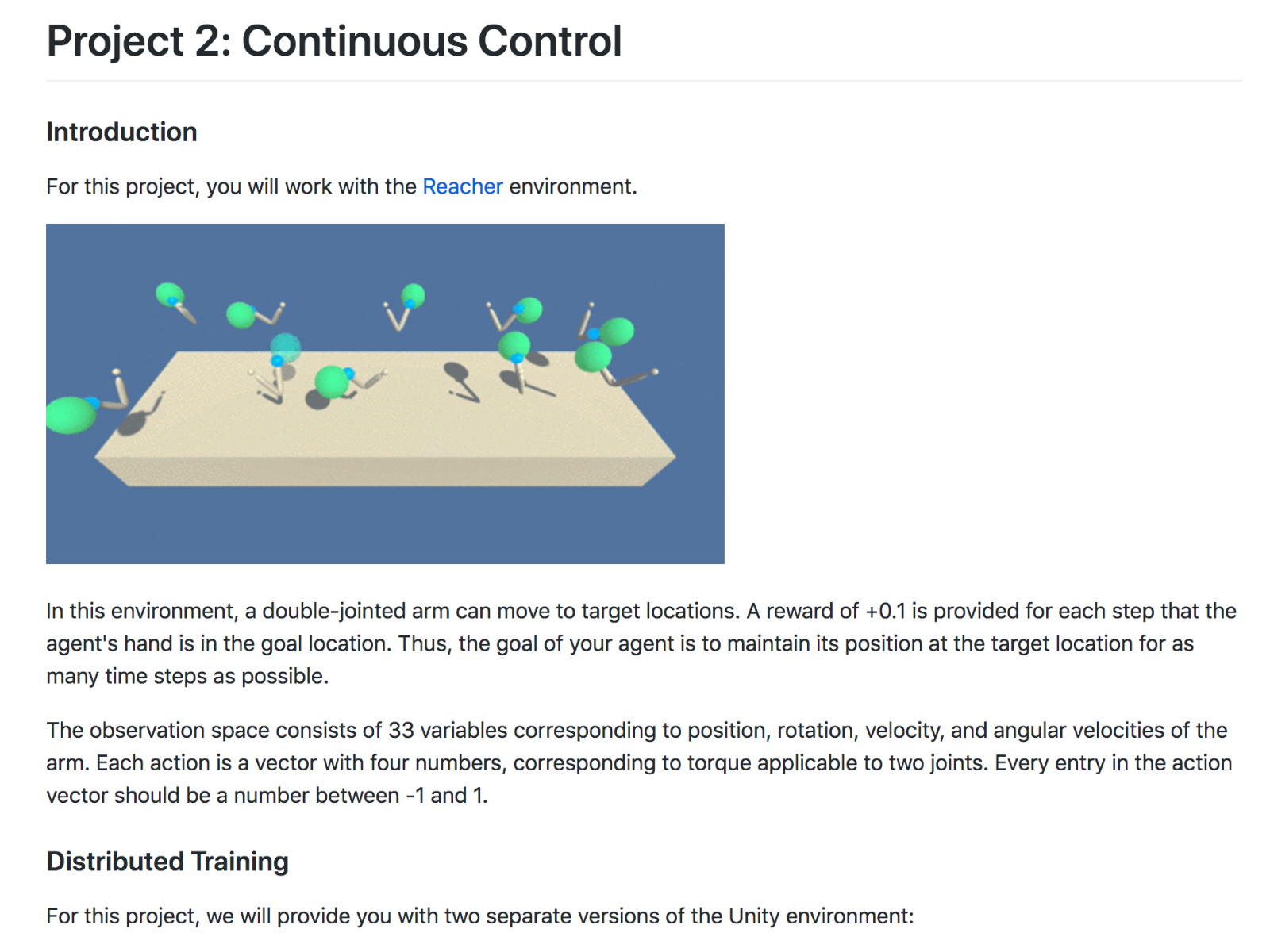
The task is solved on both single and multi-agents environments with experience sharing mechanism. Algorithms applied include DDPG, D4PG, A2C.
https://github.com/TomLin/RLND-project/tree/master/p2-continuous-control
請先登入再留言。