- Jobs
 ResumeCreate your job-winning resume using our free resume builder.
ResumeCreate your job-winning resume using our free resume builder. PortfolioShowcase your skills and projects with a professional portfolio.ResumeCreate your job-winning resume using our free resume builder.Resume BuilderMake a resume for free.Resume TemplatesAccess our extensive library of professional & ready-to-use templates.Resume ExamplesGet inspired by real resume examples to create your own.Occupation GuideAccess resume writing guides tailored for different professions.Resume HelpGet expert advice on all things resume from our team of recruitment specialists.
PortfolioShowcase your skills and projects with a professional portfolio.ResumeCreate your job-winning resume using our free resume builder.Resume BuilderMake a resume for free.Resume TemplatesAccess our extensive library of professional & ready-to-use templates.Resume ExamplesGet inspired by real resume examples to create your own.Occupation GuideAccess resume writing guides tailored for different professions.Resume HelpGet expert advice on all things resume from our team of recruitment specialists.- ResourcesSuccess StoriesBusiness ExcellenceAbout CakeResumeFeatured Reads
- Hire
- Download our App



Phantom Omni Project | 研究助理

Phantom Omni Project | 研究助理
全端工程師
・
Taipei City, Taiwan

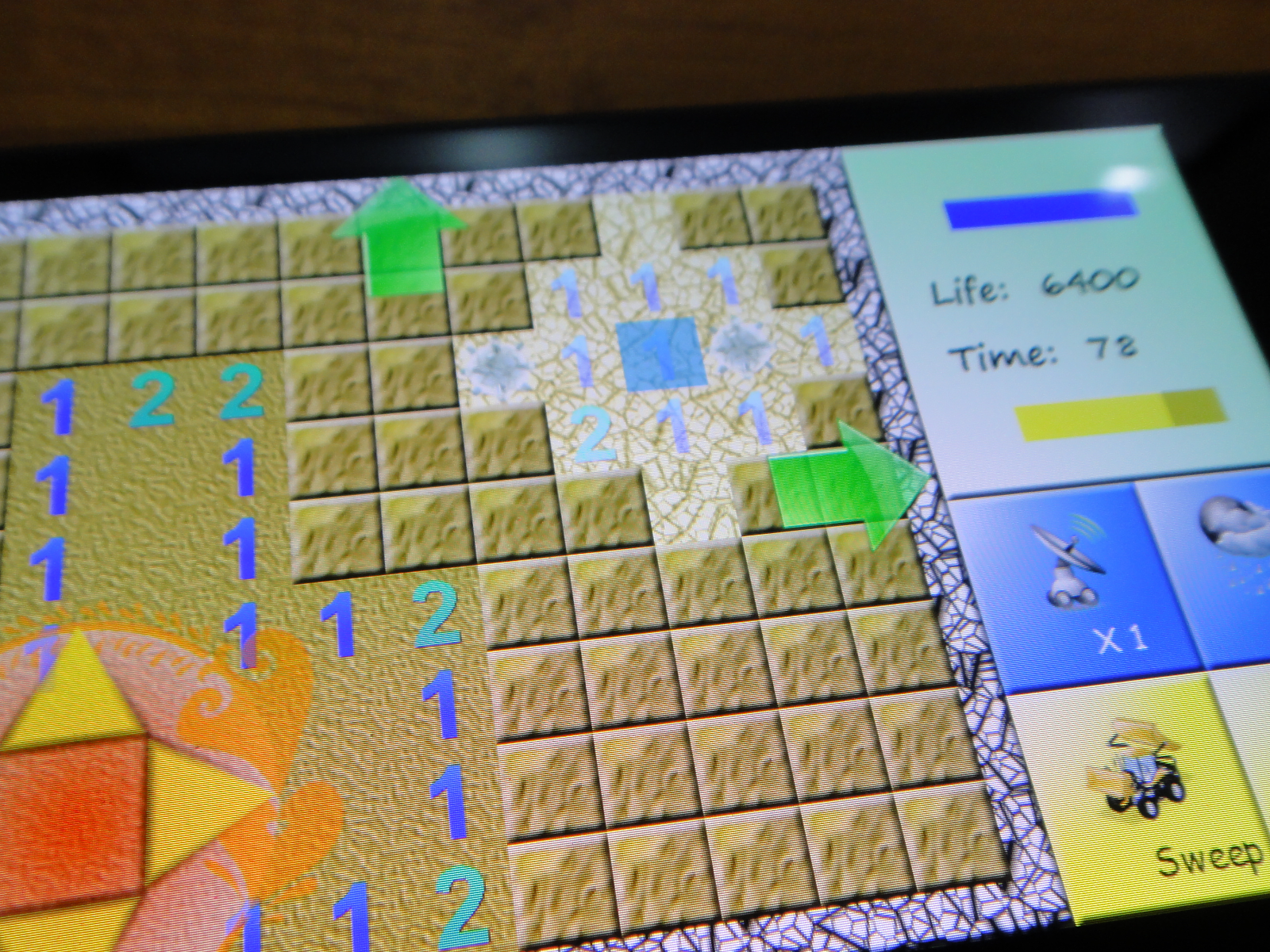
本研究目的在探討運動訓練經驗對於人類動作控制能力可塑性之影響。藉由力回饋系統設計兩種物體追蹤作業(純手眼協調作業、手眼協調外加力回饋綜合作業),來探討受長期太極推手訓練者,其經推手所訓練出的聽勁和沾粘勁,對於雙手的力控制學習、手眼協調能力,與未受太極推手訓練的一般對象之間的差異。初步發現,太極組在綜合作業中,誤差指標較一般組低,且更為穩定,慣用手與非慣用手間之表現差異也較一般組小,即太極拳練習者有較佳的雙手力調控能力且能快速應對外在干擾力場之變化。本研究結果有助於釐清不同運動訓練型態與運動控制能力間的關聯性,並且能作為進一步探討太極拳對大腦可塑性影響之腦造影研究之基礎。
實驗錄影:https://www.youtube.com/watch?v=9RocZSx_JDQ
實際影像:https://www.youtube.com/watch?v=QJfwbpMDxgI
相關發表:
2016.01.23 運動訓練經驗對於手部力回饋學習之影響
http://icn.ncu.edu.tw/tscn/file/TSCN_2016_brochure.pdf (p.19)
相關技術:
- XNA Game Studio刻畫介面並結合硬體裝置。
- Phantom Omni裝置的使用。
- C#撰寫interface存取.dll檔案之API。
Please login to comment.