- Jobs
 ResumeCreate your job-winning resume using our free resume builder.
ResumeCreate your job-winning resume using our free resume builder. PortfolioShowcase your skills and projects with a professional portfolio.ResumeCreate your job-winning resume using our free resume builder.Resume BuilderMake a resume for free.Resume TemplatesAccess our extensive library of professional & ready-to-use templates.Resume ExamplesGet inspired by real resume examples to create your own.Occupation GuideAccess resume writing guides tailored for different professions.Resume HelpGet expert advice on all things resume from our team of recruitment specialists.
PortfolioShowcase your skills and projects with a professional portfolio.ResumeCreate your job-winning resume using our free resume builder.Resume BuilderMake a resume for free.Resume TemplatesAccess our extensive library of professional & ready-to-use templates.Resume ExamplesGet inspired by real resume examples to create your own.Occupation GuideAccess resume writing guides tailored for different professions.Resume HelpGet expert advice on all things resume from our team of recruitment specialists.- ResourcesSuccess StoriesBusiness ExcellenceAbout CakeResumeFeatured Reads
- Hire
- Download our App



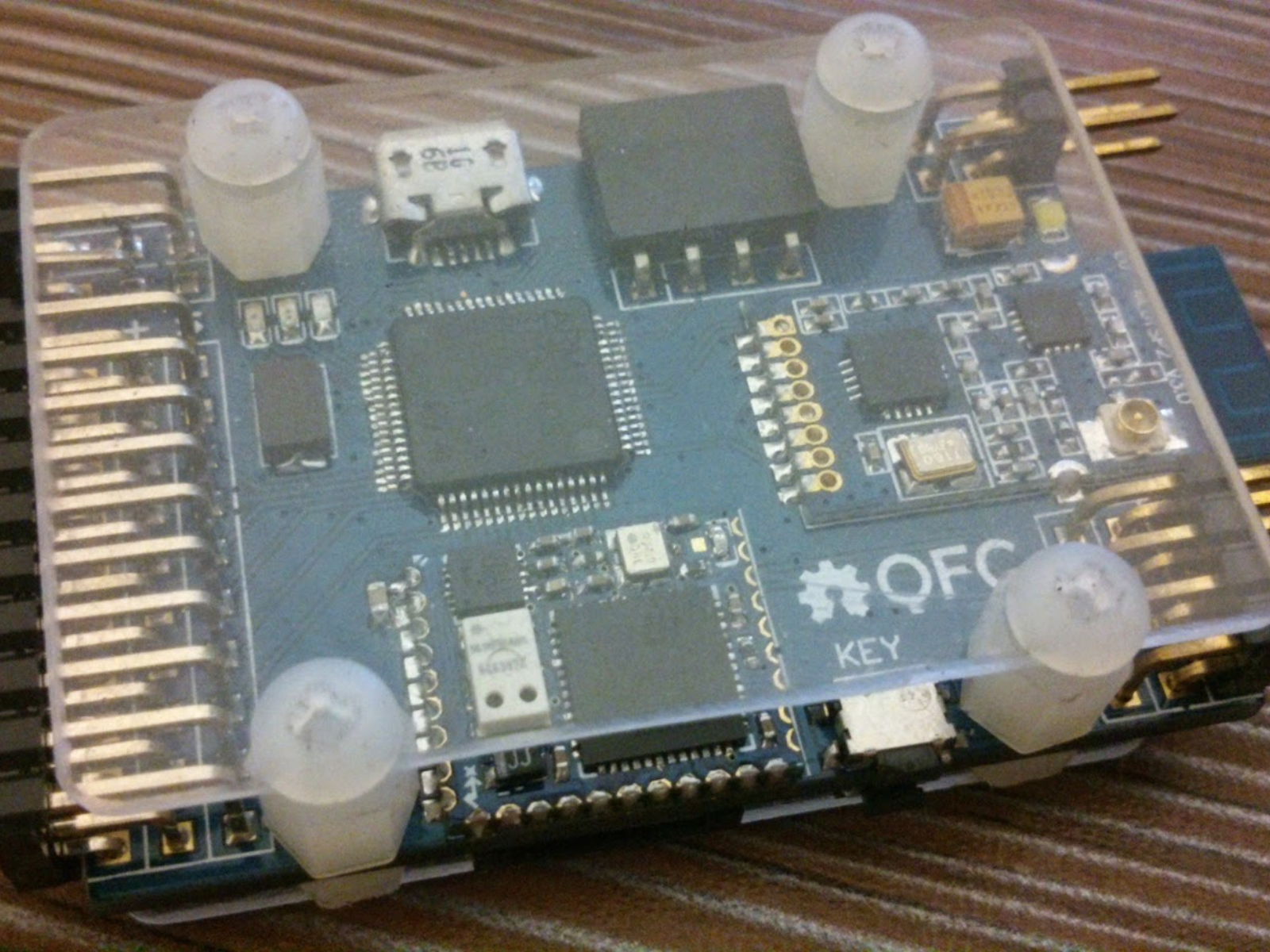
QCopterNano

QCopterNano
Software Engineer
・
Taipei City, Taiwan
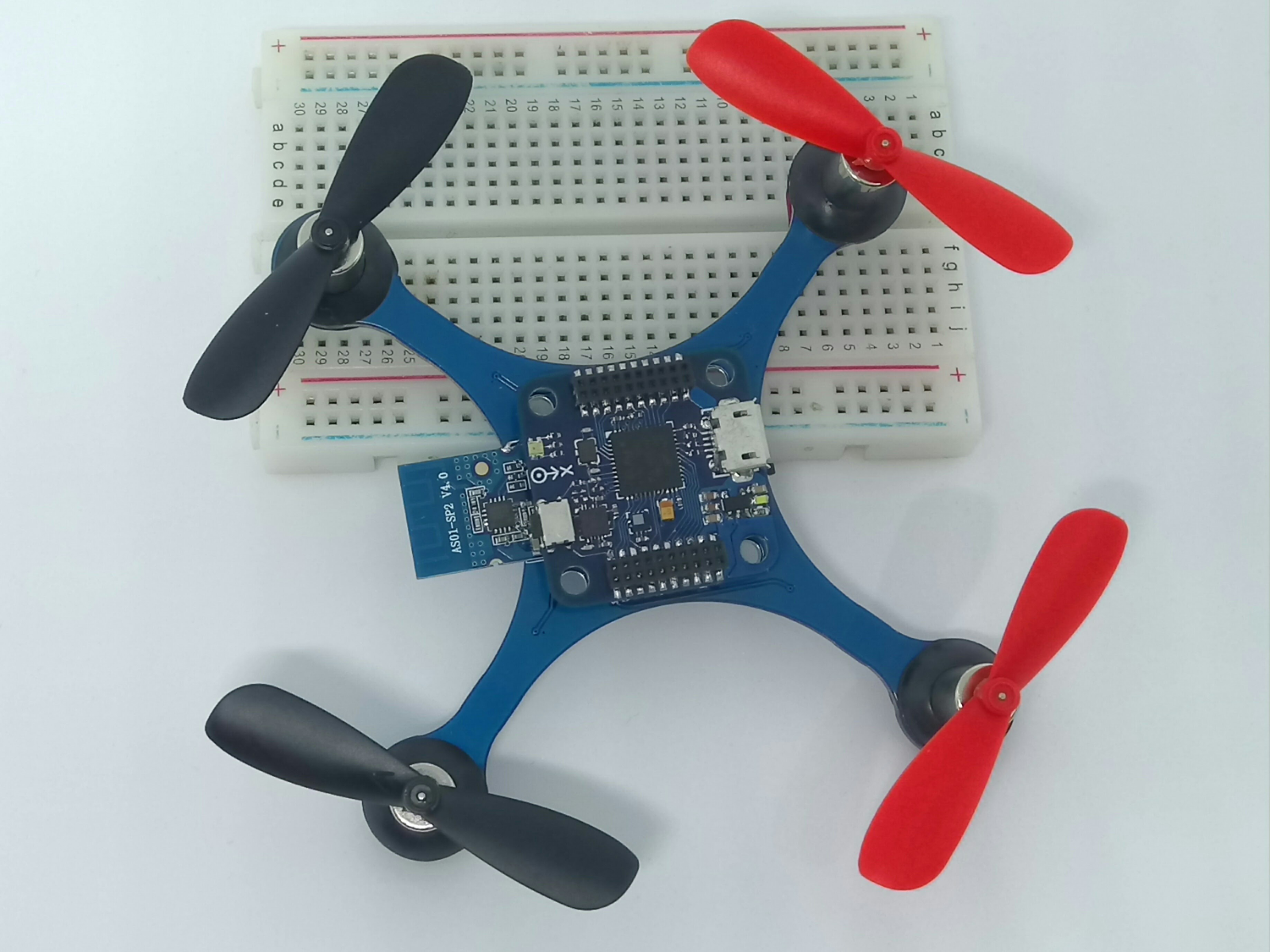
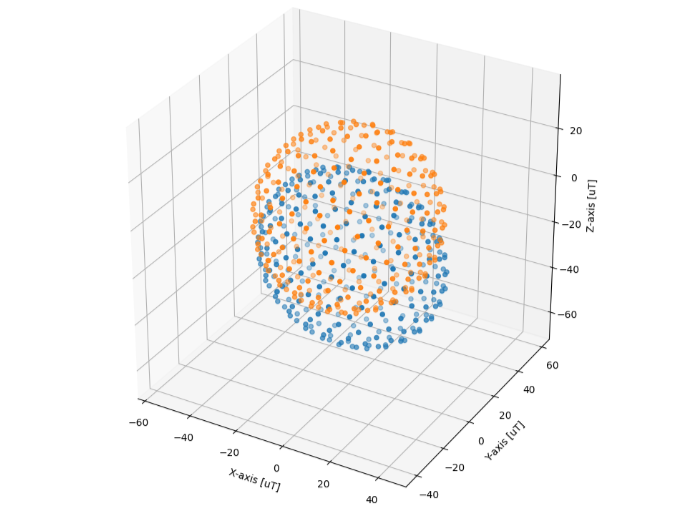
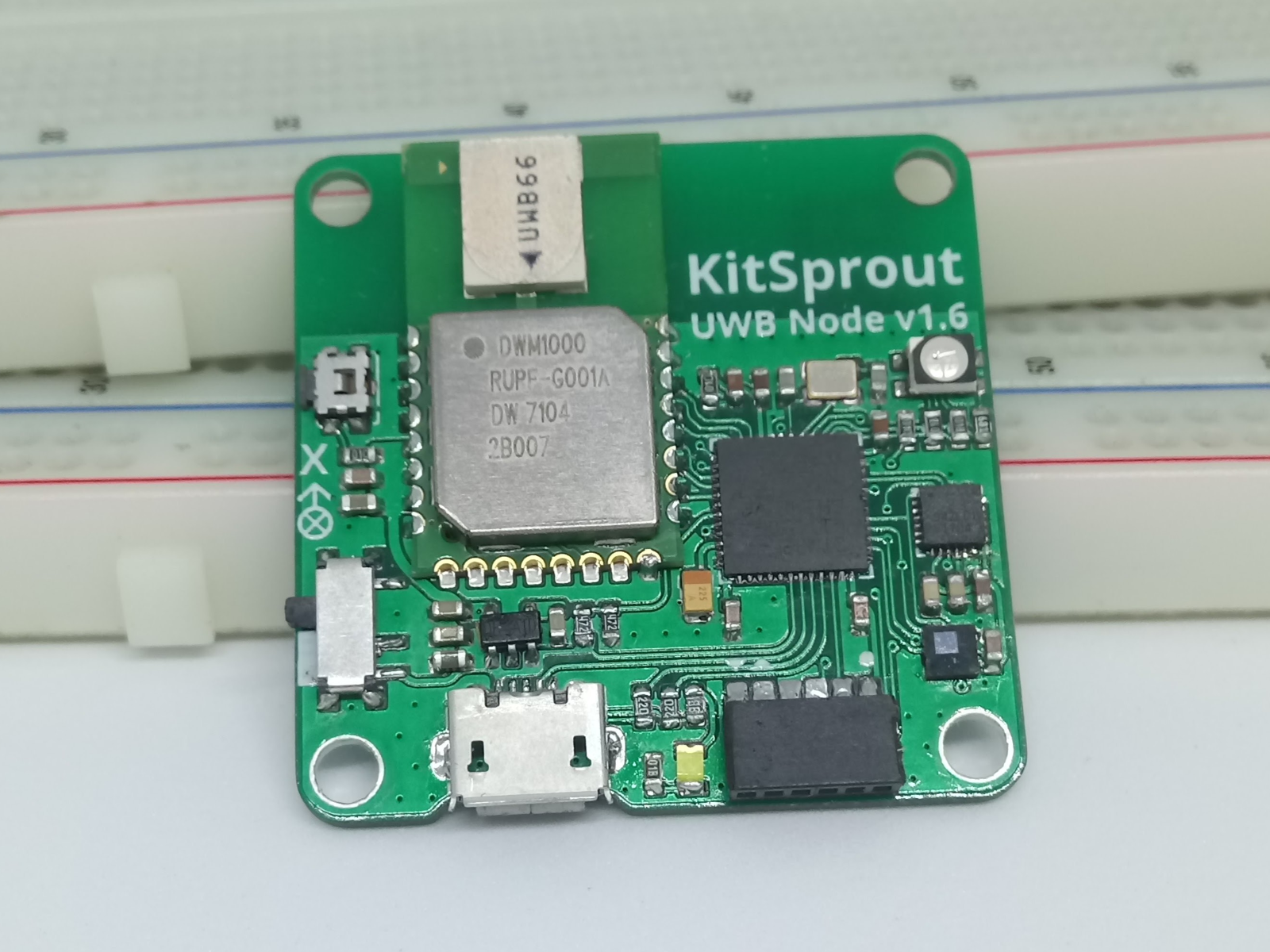
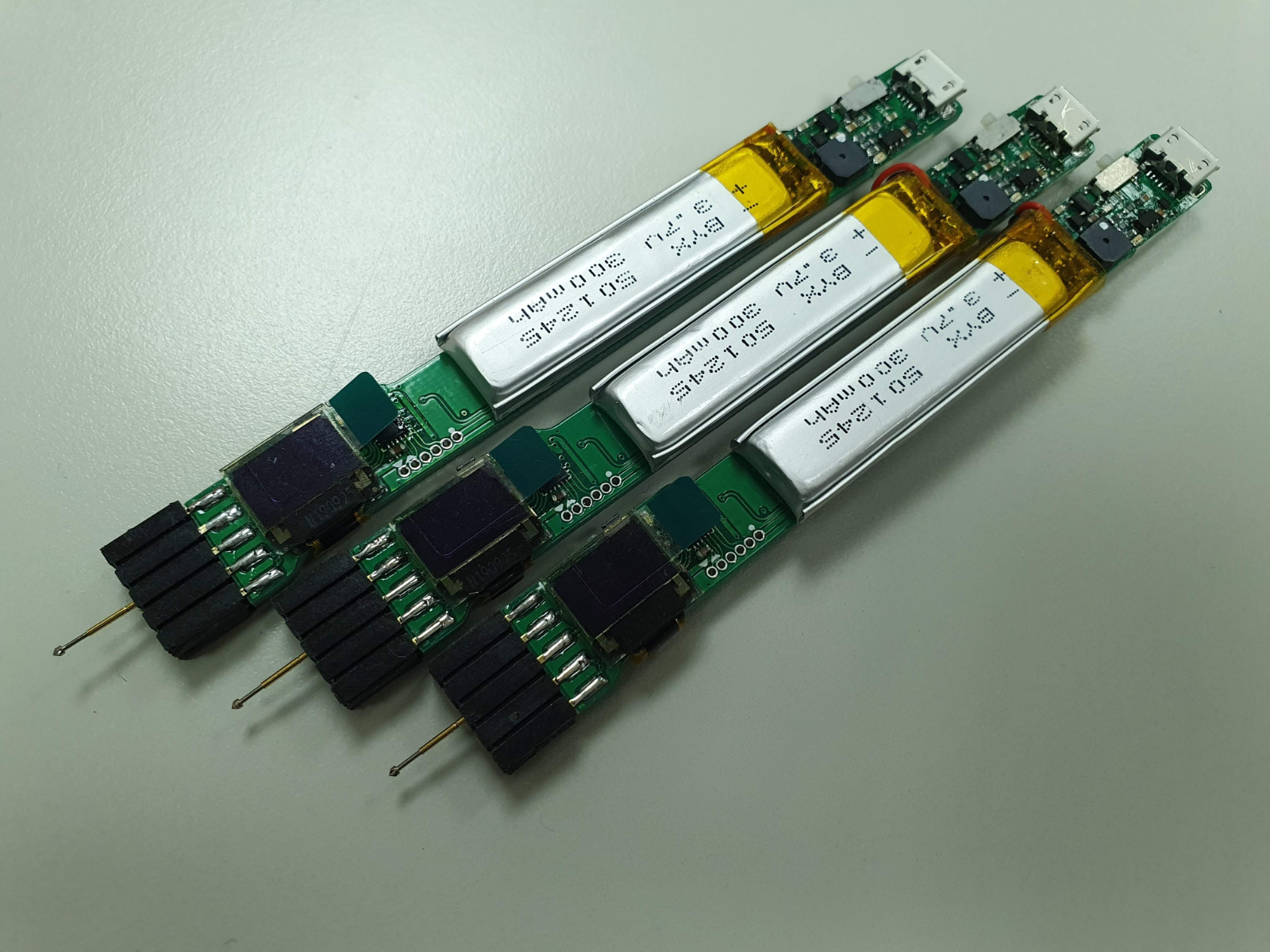
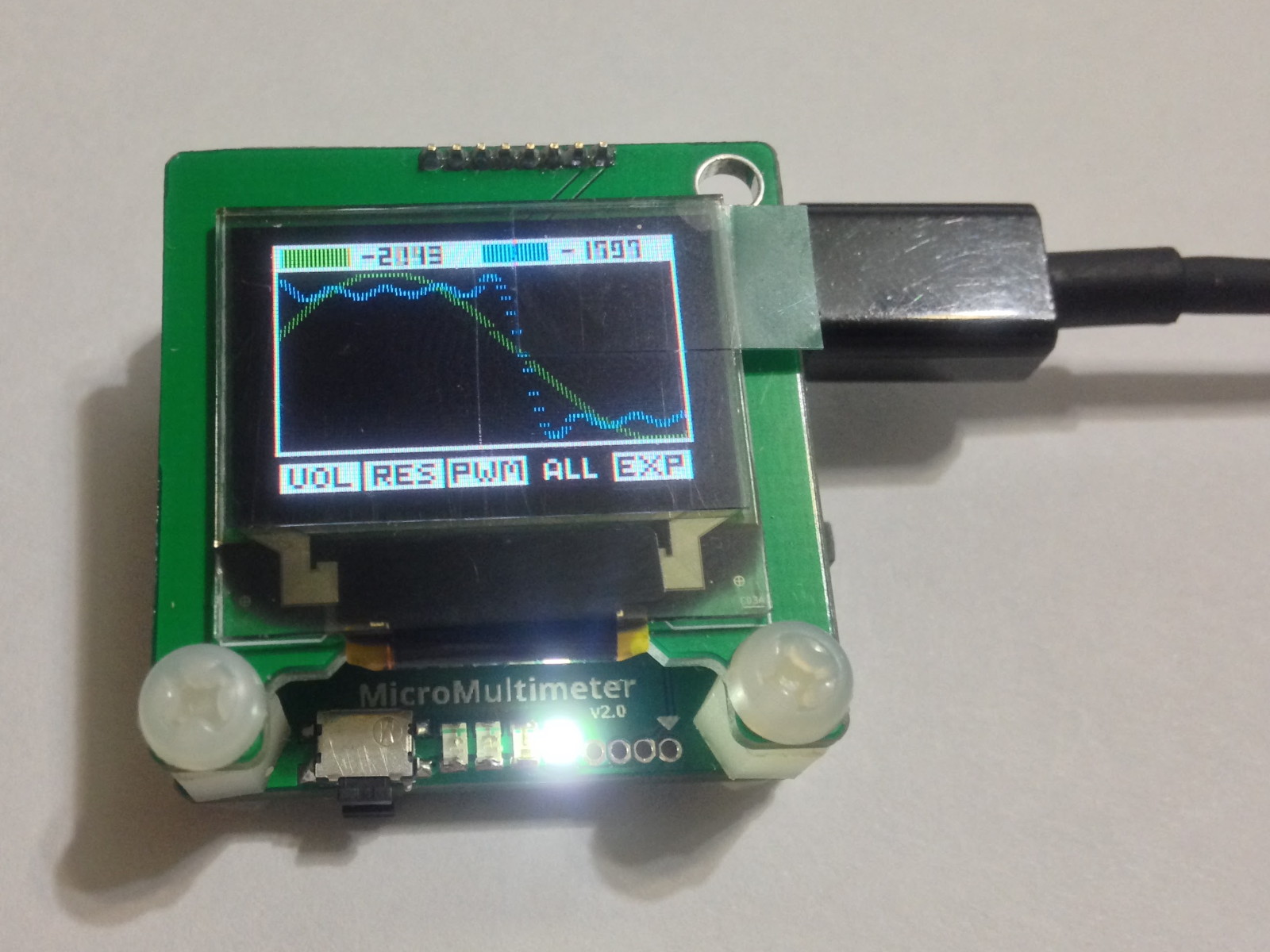
QCopterNano是一個基於Cortex-M4的微型四軸飛行器,馬達軸距80mm,含電池重量約30g,飛控採用SmartIMU,具有9DOF慣性感測元件與高效能的微控制器,透過nRF24L01P來做無線的資料傳輸、遙控,馬達座採用3D Printer製作,目前因為天線與電池放置問題,傳輸非常容易受到干擾。
https://github.com/KitSprout/QCopterNano
Please login to comment.